 EN
EN
 AR
AR
 FI
FI
 NL
NL
 DA
DA
 CS
CS
 PT
PT
 PL
PL
 NO
NO
 KO
KO
 JA
JA
 IT
IT
 HI
HI
 EL
EL
 FR
FR
 DE
DE
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SK
SK
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 FA
FA
 MS
MS
 HA
HA
 KM
KM
 LO
LO
 NE
NE
 PA
PA
 YO
YO
 MY
MY
 KK
KK
 SI
SI
 KY
KY

ชิ้นส่วนที่ขาดไม่ได้: การวิเคราะห์บทบาทสำคัญของพวกมันในระบบส่งกำลัง
เฟืองมีความสำคัญในระบบส่งกำลัง ในอุตสาหกรรมยานยนต์ เฟืองเป็นองค์ประกอบหลักในระบบเกียร์ รถยนต์เกียร์ธรรมดาใช้เฟืองในกล่องเกียร์ การจับคู่เฟืองที่แตกต่างกันช่วยให้สามารถปรับความเร็วและแรงบิดได้ตามสภาพการขับขี่ เช่น การเร่ง การแล่น และการปีนเขา เฟืองเกลียวช่วยลดเสียงดังและแรงสั่นสะเทือนเพื่อเพิ่มความสะดวกสบายในการขับขี่
一、 ประเภทและการทำงานของเฟือง
1.0. ประเภทของเฟือง
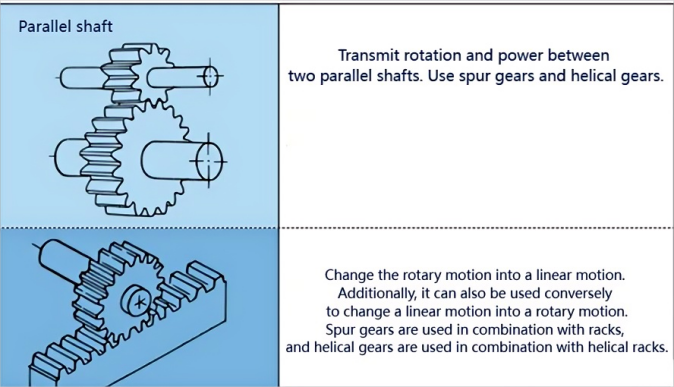
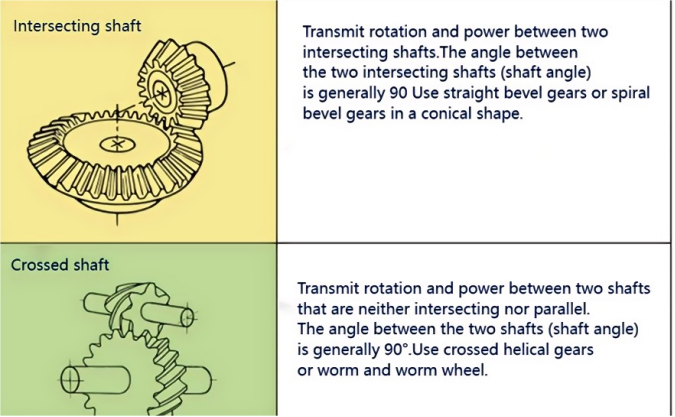
มีหลายประเภทของเฟือง วิธีการจำแนกประเภทที่พบบ่อยที่สุดคือตามแกนของเฟือง โดยทั่วไปแล้วจะแบ่งออกเป็นสามประเภท: แกนขนาน, แกนตัดกัน และแกนไขว้ เฟืองแกนขนานรวมถึงเฟืองซี่ตรง เฟืองเกลียว เฟืองภายใน เฟือง Rack และเฟือง Helical Rack เป็นต้น เฟืองแกนตัดกันรวมถึงเฟืองกรวยซี่ตรง เฟืองกรวยเกลียว เฟืองกรวยศูนย์ศูนย์ เป็นต้น เฟืองแกนไขว้รวมถึงเฟืองเกลียวไขว้ เฟืองเวิร์มและเฟืองเวิร์มล้อ เฟืองไฮโพด เป็นต้น
(การจำแนกประเภทและประเภทของเฟือง)
|
การจัดหมวดหมู่ของเฟือง |
ประเภทของเฟือง |
ประสิทธิภาพ ((%) |
|
เพลาขนาน |
เฟืองตรง |
98.0-99.5 |
|
ชั้นวางของ |
||
|
เครื่องมือภายใน |
||
|
เฟืองเกลียว |
||
|
เฟืองเกลียวเอียง |
||
|
Herringbone gear |
||
|
เพลาตัดกัน |
เฟืองเอียงตรง |
98.0-99.0 |
|
เกียร์เบเวลแบบเกลียว |
||
|
เฟืองมุมศูนย์องศา |
||
|
เพลาไขว้ |
เฟืองเกลียวไขว้ |
70.0-95.0 |
|
หนอนทรงกระบอกและเฟืองหนอน |
30.0-80.0 |
ประสิทธิภาพที่ระบุไว้ในตารางนี้เป็นประสิทธิภาพของการส่งผ่านพลังงาน และไม่รวมถึงการสูญเสียจากแบริ่ง การ揽กวนของน้ำมันหล่อลื่น ฯลฯ การ 啮เข้าด้วยกันของคู่เฟืองบนแกนขนานและแกนที่ตัดกันนั้นมีลักษณะพื้นฐานของการกลิ้ง และการเลื่อนสัมพัทธ์ค่อนข้างน้อย จึงมีประสิทธิภาพสูง ในกรณีของเฟืองเกลียวแกนเฉียงและหนอนทรงกระบอกและเฟืองหนอน และคู่เฟืองแกนเฉียงอื่น ๆ เนื่องจากการหมุนถูกสร้างขึ้นผ่านการเลื่อนสัมพัทธ์เพื่อให้เกิดการส่งผ่านพลังงาน ผลกระทบจากการเสียดทานจึงมีขนาดใหญ่มาก และประสิทธิภาพในการส่งผ่านพลังงานจะลดลงเมื่อเทียบกับเฟืองชนิดอื่น ประสิทธิภาพของเฟืองคือประสิทธิภาพในการส่งผ่านพลังงานของเฟืองภายใต้เงื่อนไขการประกอบที่เหมาะสม หากมีการติดตั้งที่ไม่ถูกต้อง โดยเฉพาะอย่างยิ่งเมื่อระยะการประกอบของเฟืองกรอสไม่ถูกต้องและมีข้อผิดพลาดในจุดตัดของกรวย ประสิทธิภาพของมันจะลดลงอย่างมาก
2.0 บทบาทของเฟือง เฟือง
เฟืองต้องใช้งานร่วมกันเป็นคู่จึงจะมีประสิทธิภาพ
2.1 ส่งต่อพลังงานของการเคลื่อนที่ทางกลไก: มีเฟืองมากมายในรถยนต์หลายคัน เฟืองเหล่านี้สามารถช่วยในการทำงานของรถยนต์หรือเครื่องจักรอื่น ๆ ได้ เช่น เหมือนกับระบบเปลี่ยนเกียร์ในรถยนต์และกล่องทดรอบในอุตสาหกรรม เป็นต้น โดยบทบาทของเฟือง ทำให้พวกมันสามารถทำงานได้อย่างปกติ
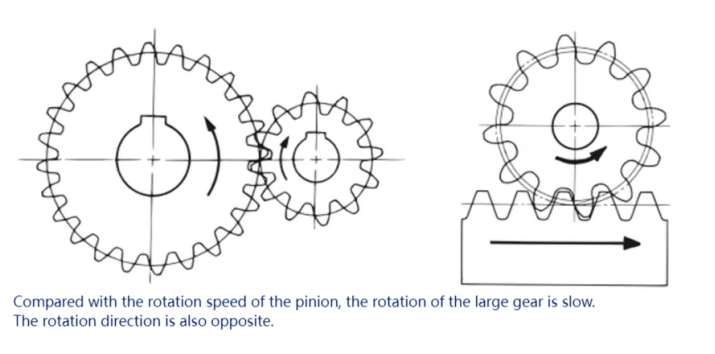
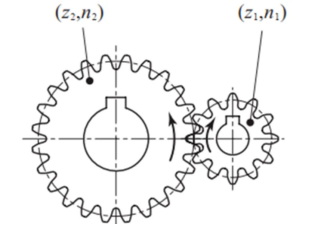
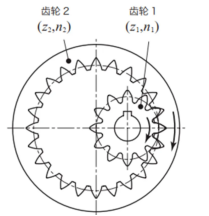
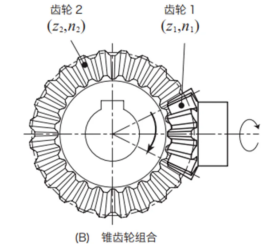
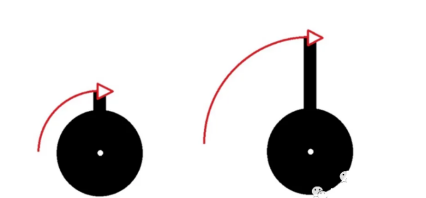
2.2 เปลี่ยนทิศทางการเคลื่อนที่:
รูปด้านล่างแสดงกฎเกณฑ์ของการเปลี่ยนทิศทางการเคลื่อนที่โดยการใช้เฟืองแบบต่าง ๆ
2.3 เปลี่ยนความเร็วของการเคลื่อนที่: การติดตั้งชุดเฟืองขนาดใหญ่และเล็กบนเครื่องจักรสามารถทำให้เครื่องจักรเร่งหรือชะลอความเร็วได้อย่างรวดเร็ว เช่น เกียร์ทดรอบและอุปกรณ์เพิ่มความเร็ว
2.4 เปลี่ยนแรงบิดหรือแรงบิดงอ: ชุดของเฟืองขนาดใหญ่และเล็กจะเปลี่ยนแรงบิดที่ออกมาจากเฟือง (มีคำอธิบายอย่างละเอียดในข้อสามด้านล่าง)
二、 อัตราส่วนการถ่ายโอนและการหมุนของเฟือง
อัตราส่วนการถ่ายโอนคืออัตราส่วนของความเร็วเชิงมุมของชิ้นส่วนสองชิ้นที่หมุนในกลไก ซึ่งยังเป็นที่รู้จักกันในนาม อัตราส่วนความเร็ว อัตราส่วนการถ่ายโอนของชิ้นส่วน a และ b คือ i = ωa/ωb = na/nb โดยที่ ωa และ ωb เป็นความเร็วเชิงมุมของชิ้นส่วน a และ b ตามลำดับ (เรเดียนต่อวินาที); na และ nb เป็นความเร็วในการหมุนของชิ้นส่วน a และ b ตามลำดับ (รอบต่อนาที)
1.กลไกเฟืองขั้นเดียว: ชุดเฟืองที่เกิดขึ้นหลังจากเฟืองคู่หนึ่ง 啮เข้าด้วยกันเรียกว่ากลไกเฟืองขั้นเดียว
ให้จำนวนฟันของเฟืองขับในกลไกเฟืองขั้นเดียวเป็น z1 จำนวนการหมุนเป็น n1 จำนวนฟันของเฟืองที่ถูกขับเป็น z2 และจำนวนการหมุนเป็น n2 สูตรการคำนวณอัตราส่วนการถ่ายโอนคือดังนี้:
อัตราส่วนการถ่ายโอน = z2/z1 = n1/n2
ตามค่าของอัตราส่วนการถ่ายโอน กลไกเฟืองขั้นเดียวสามารถแบ่งออกได้เป็นสามประเภท:
อัตราทด < 1, กลไกเฟืองเพิ่มความเร็ว, n1 < n2
อัตราทด = 1, กลไกเฟืองความเร็วคงที่, n1 = n2
อัตราทด > 1, กลไกเฟืองลดความเร็ว, n1 > n2
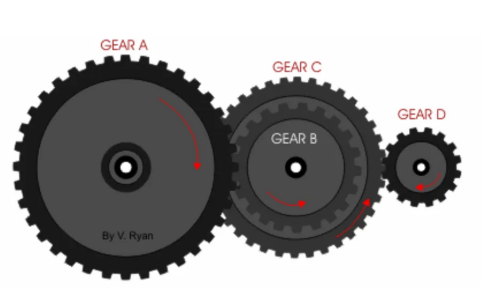
2.0 ระบบเกียร์สองระดับ เครื่องยนต์สองระยะประกอบด้วยชุดเครื่องยนต์หนึ่งระยะสองชุด
ภาพต่อไปนี้แสดงโครงสร้างของกลไกเกียร์สองระยะ
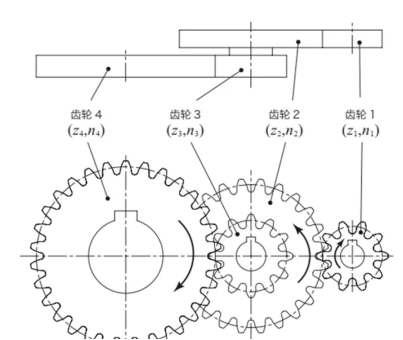
อัตราการส่ง = z2/z1 * z4/z3 = n1/n2 * n3/n4
ตัวอย่างต่อไปนี้คือการคํานวณอัตราการส่งของกลไกเกียร์สองระยะ
|
เลขลําดับ |
รายการ |
รหัส |
สูตร |
ตัวอย่างการคำนวณ |
|
|
PINION |
เฟืองขนาดใหญ่ |
||||
|
1 |
จำนวนฟันเฟือง (เกียร์ขั้นแรก) |
Z1,Z2 |
ค่าที่ตั้งไว้ |
10 |
24 |
|
2 |
จำนวนฟันเฟือง (เกียร์ขั้นที่สอง) |
Z3,24 |
12 |
30 |
|
|
3 |
การหมุน (เกียร์ 1) |
n1 |
1200 |
- |
|
|
4 |
อัตราทด (ขั้นแรก) |
i1 |
Z2/Z1 |
2.4 |
|
|
5 |
อัตราทด (ขั้นที่สอง) |
i2 |
Z4/Z3 |
2.5 |
|
|
6 |
อัตราทด |
ฉัน |
i1×i2 |
6 |
|
|
7 |
ความเร็วในการหมุน (เฟืองที่ 2 และ 3) |
n2 |
n1/i1 |
500 |
|
|
8 |
ความเร็วในการหมุน (เฟืองที่ 4) |
n4 |
n1/i |
- |
200 |
|
หน่วยของความเร็วในการหมุนคือ rpm ค่าที่ตั้งไว้คือค่าที่นักออกแบบกำหนดไว้ล่วงหน้า |
|||||
三、 ความสัมพันธ์ระหว่างแรงบิด พลังงาน และความเร็วในการหมุน
ลองดูสูตรบางอย่างก่อนและทำความเข้าใจทีละขั้นตอน
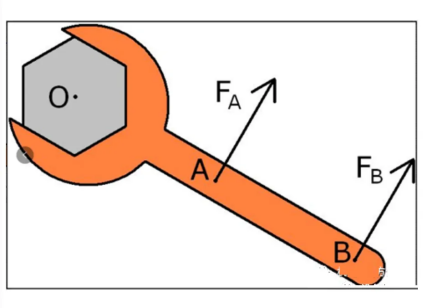
a. ในฟิสิกส์, คราวของแรง, คราวของแรง = กําลัง × แอร์มเลเวอร์ (เส้นตรง) สูตรในการคํานวณวัตถุแรงคือ M = L × F. หน่วยวัตถุแรงคือ นิวตัน - เมตร เรียกง่าย ๆ ว่า N - m โดยมีสัญลักษณ์ N * m
แขนเลเวอร์ OA × แรง Fa = แขนเลเวอร์ OB × แรง Fb
b. ในสภาพหมุน, ทอร์ค (วินาทีแรงพิเศษ) = F (แรง) × r (รัศมีของการหมุน), นั่นคือผลผลของแรงสัมผัสและรัศมีของวงกลมจากแรงไปยังจุดการกระทํา สูตรในการคํานวณทอร์คคือ: M = F*r
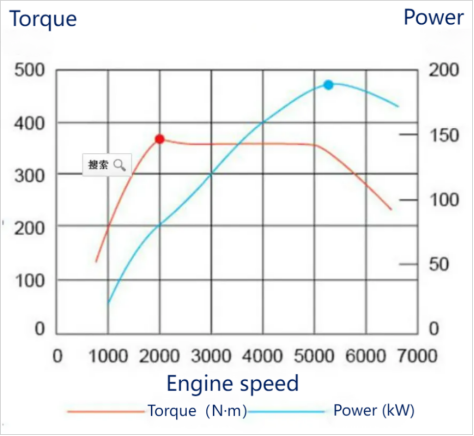
c. ความสัมพันธ์ระหว่างมอริคและความเร็วหมุน: T = 9550P / n, P = T * n / 9550; P คือกําลังในกิโลวัตต์ (kW); T คือมอริคในนิวตัน - เมตร (N · m); n คือความเร็วหมุนในหมุนต่อนาที (r / 9550 เป็นค่าคงที่
d. ความสัมพันธ์ระหว่างกําลังและมอเตอร์และความเร็วหมุน: กําลัง (kW) P = ทอร์ค (N·m) T × ความเร็วหมุน (RPM) n/9550, นั่นคือ P = T*n/9550, ซึ่งสามารถเข้าใจได้ด้วยรูปต่อไปนี้
จากแผนภาพการหมุนของเฟือง จะเห็นได้ว่าพลังงานยังคงไม่เปลี่ยนแปลง (โดยไม่นับการสูญเสียจากการถ่ายโอน) แต่ความเร็วในการหมุนลดลง ตามสมการ พลังงาน = แรงบิด × ความเร็วในการหมุน (*ค่าคงที่) จำนวนครั้งที่ความเร็วในการหมุนปลายล้อลดลงจะเท่ากับจำนวนครั้งที่แรงบิดปลายล้อเพิ่มขึ้น - นี่คือที่มาของ "แรงบิดปลายล้อ"
ตัวอย่างเช่น ความสัมพันธ์ระหว่างพลังงาน แรงบิด และความเร็วเชิงมุม: พลังงาน P = แรงบิด T × ความเร็วเชิงมุม ω
เนื่องจากกำลัง P = งาน W ÷ เวลา t และงาน W = แรง F × ระยะทาง s ดังนั้น P = F×s/t = F×ความเร็วเชิงเส้น v โดยที่ v เป็นความเร็วเชิงเส้น ในเครื่องยนต์ ความเร็วเชิงเส้น v ของเพลาข้อเหวี่ยง = ความเร็วเชิงมุม ω ของเพลาข้อเหวี่ยง × รัศมี r ของเพลาข้อเหวี่ยง
แทนค่าลงในสูตรด้านบนจะได้: กำลัง P = แรง F × รัศมี r × ความเร็วเชิงมุม ω และแรง F × รัศมี r = โมเมนต์แรงบิด ดังนั้นสามารถสรุปได้ว่า กำลัง P = โมเมนต์แรงบิด × ความเร็วเชิงมุม ω ดังนั้น กำลังของเครื่องยนต์สามารถคำนวณได้จากโมเมนต์แรงบิดและความเร็วในการหมุน
ตัวอย่างภาพประกอบ
ความสัมพันธ์เพิ่มเติม: ต่อไปนี้สำหรับการเคลื่อนที่แบบวงกลมสม่ำเสมอ
1. ความเร็วเชิงเส้น V = s/t = 2πR/T
2.ความเร็วเชิงมุม ω = Φ/t = 2π/T = 2πf.
3.ความสัมพันธ์ระหว่างความเร็วเชิงเส้นและความเร็วเชิงมุม: ความเร็วเชิงเส้น = ความเร็วเชิงมุม × รัศมี, V = ωR.
4.ความสัมพันธ์ระหว่างความเร็วเชิงมุมและความถี่ของการหมุน ω = 2πn (ในที่นี้ ความถี่และความถี่ของการหมุนมีความหมายเหมือนกัน).
5.คาบและความถี่ T = 1/f.
ปริมาณทางฟิสิกส์และการวัดหลัก: ความยาวของเส้นโค้ง (S): เมตร (m); มุม (Φ): เรเดียน (rad); ความถี่ (f): เฮิรตซ์ (Hz); คาบ (T): วินาที (s); ความถี่ของการหมุน (n): r/s; รัศมี (R): เมตร (m); ความเร็วเชิงเส้น (V): m/s; ความเร็วเชิงมุม (ω): rad/s.




