 EN
EN
 AR
AR
 FI
FI
 NL
NL
 DA
DA
 CS
CS
 PT
PT
 PL
PL
 NO
NO
 KO
KO
 JA
JA
 IT
IT
 HI
HI
 EL
EL
 FR
FR
 DE
DE
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SK
SK
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 FA
FA
 MS
MS
 HA
HA
 KM
KM
 LO
LO
 NE
NE
 PA
PA
 YO
YO
 MY
MY
 KK
KK
 SI
SI
 KY
KY

Inginerii indispensabili: Analizând rolurile cheie pe care le au în sistemele de transmisie
Roțile dentate sunt esențiale în sistemele de transmisie. În domeniul automotive, acestea joacă un rol cheie în transmisie. Transmișiile manuale folosesc roți dentate în cutia de viteze. Diferite combinații de roți permit ajustările de viteză și cuplu pentru diverse condiții de conducere, cum ar fi accelerarea, curșarea sau urcarea pe poduri. Roțile dentate elicoidale reduc zgomotul și vibrațiile pentru o confort maxim în timpul conducerii.
1, Tipuri și funcții ale rotilor dentate
1.0. Tipuri de roți dentate
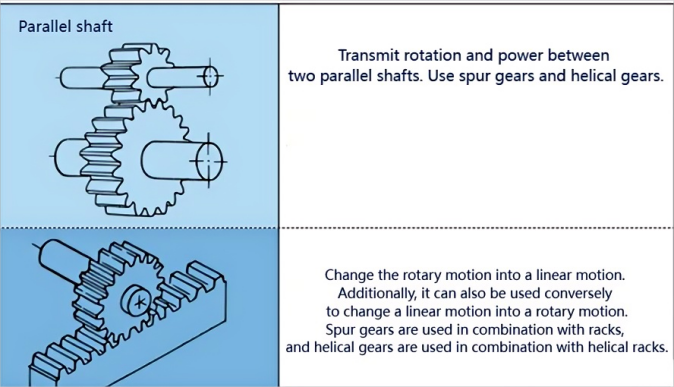
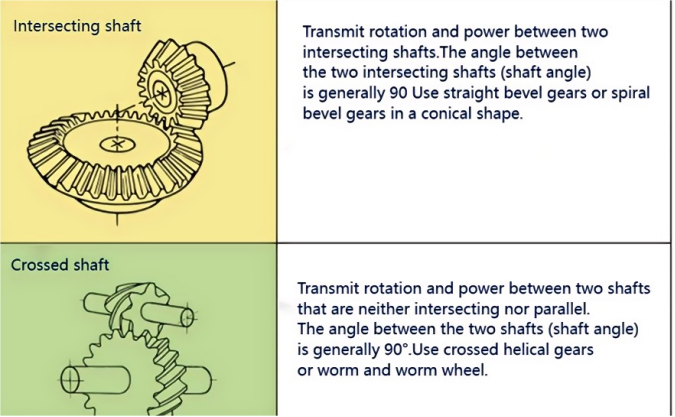
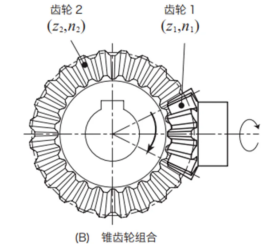
Există numeroase tipuri de roți dentate. Cel mai utilizat metoda de clasificare se bazează pe axa roții. În general, acestea se împart în trei categorii: cu axe paralele, cu axe intersectante și cu axe crosetate. Roțile dentate cu axe paralele includ roțile drepte, roțile elicoidale, roțile interne, benzi dentate și benzi elicoidale, etc. Roțile dentate cu axe intersectante includ roțile conice drepte, roțile conice elicoidale, roțile conice de grad zero, etc. Roțile dentate cu axe crosetate includ roțile elicoidale crosetate, vermele și roata vermetată, roțile hipoidale, etc.
(Clasificare și tipuri de roți dentate).
|
Clasificare a transmisiei cu benzi |
Tipuri de transmisii cu benzi |
Eficiență (%) |
|
Axă paralelă |
Roată dințată cu dinți drepți |
98.0-99.5 |
|
Cârlig |
||
|
Unelte interne |
||
|
Roata Dentată Helical |
||
|
Rochet elicoidal |
||
|
Reducere de Tip Herringbone |
||
|
Inghițește cu axa |
Roată conică dreaptă |
98.0-99.0 |
|
Roșetă conică spirală |
||
|
Rota de frânghie cu unghi nul |
||
|
Axa croisă |
Roți elicoidale croise |
70.0-95.0 |
|
Șarpe cilindric și roată de șarpe |
30.0-80.0 |
Eficiențele enumerate în această tabelă sunt eficiențe de transmisie și nu includ pierderile din cauza țevilor, amestecul lubrifiantului, etc. Înghetarea perechilor de trepte pe axe paralele și intersectate este în esență rulantă, iar alunecarea relativă este foarte mică, prin urmare eficiența este ridicată. Pentru treptele elicoidale cu axe crosetate și perechi de trepte de șarpe și roată de șarpe, deoarece rotația este generată prin alunecarea relativă pentru a realiza transmiterea puterii, influența frecarei este foarte mare, iar eficiența de transmisie scade față de alte trepte. Eficiența unei trepte este eficiența de transmisie a treptei sub condiții normale de montare. Dacă există o montare incorectă, mai ales când distanța de montare a treptelor conice este incorectă și există o eroare la punctul de intersecție conic, eficiența sa va scădea semnificativ.
2.0 Rolul treptelor Trepte
Roțile dentate trebuie să fie utilizate în perechi pentru a fi eficiente
2.1 Transmiterea puterii mișcării mecanice: Există multe roți dentate în multe mașini. Aceste roți dentate pot să ajute la funcționarea mașinilor sau a altor aparate diverse. De exemplu, ca dispozitivul de schimbare a vitezelor din mașini și cutiile reduse industriale, etc. Cu rolul rotilor dentate, acestea pot funcționa normal.
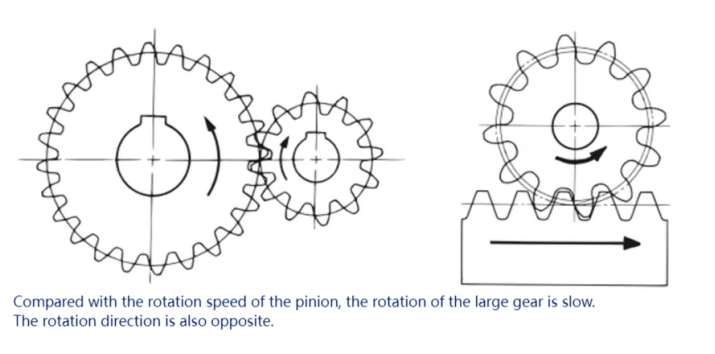
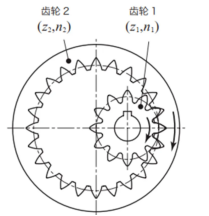
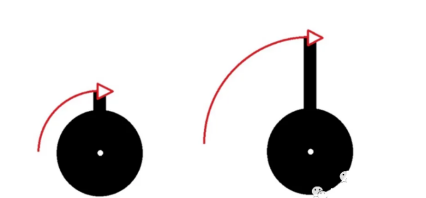
2.2 Schimbarea direcției mișcării:
Următoarea figură arată legea schimbării direcției mișcării prin diferite combinații de roți dentate.
2.3 Schimbați viteza mișcării: Montarea combinației de roțile mari și mici pe mașină poate face ca mașina să accelereze sau să reducă viteza rapid, cum ar fi cutii de reductie și dispozitive de accelerare.
2.4 Schimbați cuplul motor sau torsiunea: Combinația dintre roțile mari și mici va schimba cuplul furnizat de roțile; (Există o explicație detaliată în al treilea punct de mai jos.)
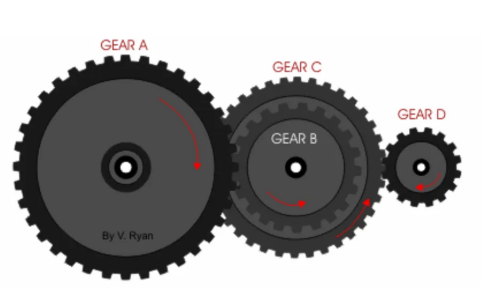
2, Raporturi de transmisie și direcții de rotație ale lanțurilor de roți
Raportul de transmisie este raportul dintre vitezele unghiulare ale a două componente rotitoare dintr-un mecanism, cunoscut și ca raport de viteză. Raportul de transmisie al componentei a și al componentei b este i = ωa/ωb = na/nb, unde ωa și ωb sunt vitezele unghiulare ale componentelor a și b respectiv (radiani pe secundă); na și nb sunt vitezele de rotație ale componentelor a și b respectiv (rotații pe minut).
1.Mecanism cu reductie într-o singură etapă: Un antrenament cu treptini format după ce o pereche de treptini este îmbinată se numește mecanism cu reductie într-o singură etapă.
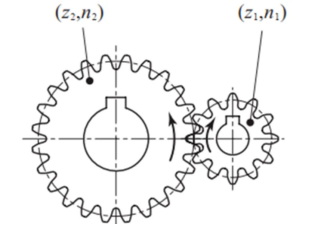
Numărul de dinți ai mecanismului de viteză de rulare al mecanismului de viteză cu un singur etap este z1, numărul de revoluții este n1, numărul de dinți ai mecanismului de rulare este z2 și numărul de revoluții este n2. Ecuația de calcul a raportului de transmisie este următoarea:
Raportul de transmisie = z2/z1 = n1/n2
În funcție de valoarea raportului de transmisie, mecanismul de transmisie cu un singur stadiu poate fi împărțit în trei categorii:
În cazul în care se utilizează un sistem de viteză de trecere, se utilizează un sistem de viteză de trecere de la 0 la 0,8 m/s.
În cazul în care se aplică cerințele de la punctul 4.2.4.2.
Raportul de transmisie > 1, mecanism cu reducere de viteză, n1 > n2
2.0 Mecanism cu reductie în două etape: Mecanismul cu reductie pe două etape este format din două seturi de mecanisme cu reductie pe o singură etapă.
Următoarea figură arată structura mecanismului cu reductie pe două etape.
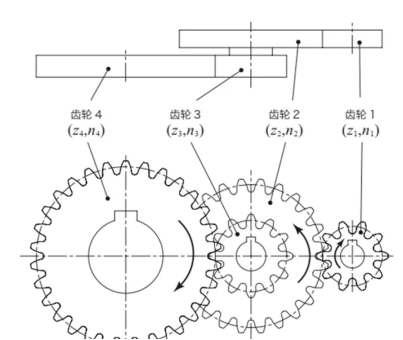
Raportul de transmisie = z2/z1 * z4/z3 = n1/n2 * n3/n4.
Următoarele este un exemplu de calcul al raportului de transmisie al unui mecanism cu reductie pe două etape.
|
Numărul de serie |
Articol |
Cod |
Formula |
Exemplu de calcul |
|
|
PINION |
Rota mare |
||||
|
1 |
Număr de dinți (rota din primul etapă) |
Z1, Z2 |
Valoare setată |
10 |
24 |
|
2 |
Număr de dinți (rota din al doilea etapă) |
Z3,24 |
12 |
30 |
|
|
3 |
Rotație (treapta 1) |
n1 |
1200 |
- |
|
|
4 |
Raport de transmisie (primul etap) |
i1 |
Z2/Z1 |
2.4 |
|
|
5 |
Raport de transmisie (al doilea etap) |
i2 |
Z4/Z3 |
2.5 |
|
|
6 |
Raport de transmisie |
i |
i1×i2 |
6 |
|
|
7 |
Viteza de rotație (roții 2 și 3) |
n2 |
n1/i1 |
500 |
|
|
8 |
Viteza de rotație (roata 4) |
n4 |
n1/i |
- |
200 |
|
Unitatea de măsură a vitezei de rotație este rpm. Valoarea setată este valoarea prestabilită de proiectant. |
|||||
3, Relația dintre Cuplu, Putere și Viteza de Rotație
Să ne uităm mai întâi la câteva formule și să le înțelegem paș cu paș.
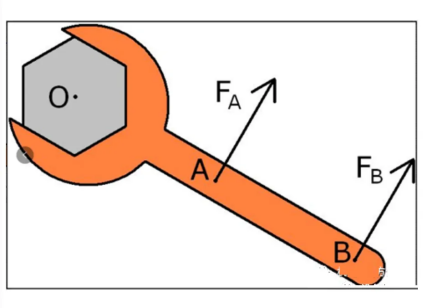
a. În fizică, momentul de forță, momentul de forță = forță × braț al levierului (linie dreaptă). Formula pentru calcularea momentului de forță este M = L×F. Unitatea de măsură a momentului de forță este Newton - metru, pur și simplu numită N - m, cu simbolul N*m.
Bratul de levier OA × forța Fa = bratul de levier OB × forța Fb.
b. Într-o stare de rotație, momentul de forță (un moment special al forței) = F (forță) × r (raza de rotație), adică produsul dintre forța tangențială și raza cercului de la forță până la punctul de acțiune. Formula pentru calcularea momentului de forță este: M = F*r.
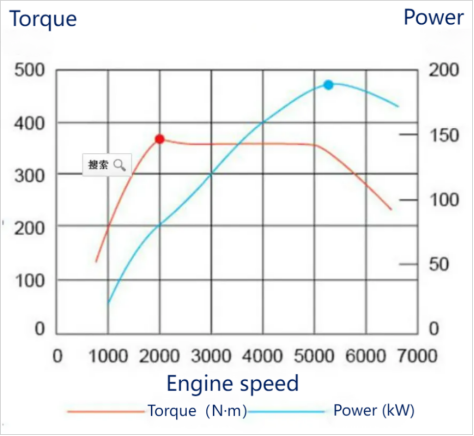
c. Relația dintre momentul de forță și viteza de rotație: T = 9550P\/n, P = T * n\/9550; P reprezintă puterea în kilowati (kW); T este momentul de forță în newton-metri (N·m); n este viteza de rotație în rotații pe minut (r\/min). 9550 este o constantă.
d. Relația dintre putere, momentul de forță și viteza de rotație: Putere (kW) P = Momentul de forță (N·m) T × Viteza de rotație (rpm) n\/9550, adică P = T*n\/9550, care se poate înțelege cu următoarea figură.
După cum se poate vedea din diagrama rotației treptelor, puterea rămâne neschimbată (ignorând pierderile de transmisie), dar viteza de rotație scade. Conform formulei putere = cuplu × viteza de rotație (*constantă), numărul de ori cât viteza de rotație la capătul roții scade este același cu numărul de ori cât cuplul motor la capătul roții crește - acesta este ceea ce se numește "cuplu la roată".
e. Relația dintre putere, cuplu și viteza unghiulară: Putere P = cuplu T × viteza unghiulară ω.
Deoarece puterea P = lucru W ÷ timp t, și lucru W = forța F × distanța s, deci P = F×s/t = F×viteză liniară v. Aici v este viteza liniară. Într-un motor, viteza liniară v a bârbatului = viteza unghiulară ω a bârbatului × raza r a bârbatului.
Înlocuind în formula de mai sus se obține: puterea P = forța F × raza r × viteza unghiulară ω. Și forța F × raza r = cuplu. Prin urmare, se poate concluziona că puterea P = cuplu × viteza unghiulară ω. Astfel, puterea unui motor poate fi calculată din cuplu și viteza de rotație.
Exemple de imagini.
Relații suplimentare: Următoarele sunt pentru mișcarea circulară uniformă.
1.Viteza liniară V = s/t = 2πR/T.
2. Viteza unghiulară ω = Φ/t = 2π/T = 2πf.
3. Legătura dintre viteza liniară și viteza unghiulară: Viteza liniară = viteza unghiulară × rază, V = ωR.
4. Legătura dintre viteza unghiulară și viteza de rotație ω = 2πn (aici frecvența și viteza de rotație au același sens).
5. Perioadă și frecvență T = 1/f.
Principalele mărimi fizice și unități: Lungimea arcului (S): metru (m); unghi (Φ): radian (rad); frecvență (f): hertz (Hz); perioadă (T): secundă (s); viteza de rotație (n): r/s; rază (R): metru (m); viteza liniară (V): m/s; viteza unghiulară (ω): rad/s.




