 EN
EN
 AR
AR
 FI
FI
 NL
NL
 DA
DA
 CS
CS
 PT
PT
 PL
PL
 NO
NO
 KO
KO
 JA
JA
 IT
IT
 HI
HI
 EL
EL
 FR
FR
 DE
DE
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SK
SK
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 FA
FA
 MS
MS
 HA
HA
 KM
KM
 LO
LO
 NE
NE
 PA
PA
 YO
YO
 MY
MY
 KK
KK
 SI
SI
 KY
KY

Engrenagens indispensáveis: Analisando seus papéis-chave nos sistemas de transmissão
As engrenagens são fundamentais nos sistemas de transmissão. No setor automotivo, elas desempenham um papel-chave na transmissão. As transmissões manuais utilizam engrenagens na caixa de câmbio. Diferentes combinações de engrenagens permitem ajustes de velocidade e torque para várias condições de direção, como aceleração, cruzeiro ou subida. As engrenagens helicoidais reduzem o ruído e as vibrações para maior conforto ao dirigir.
1, Tipos e Funções de Engrenagens
1.0. Tipos de Engrenagens
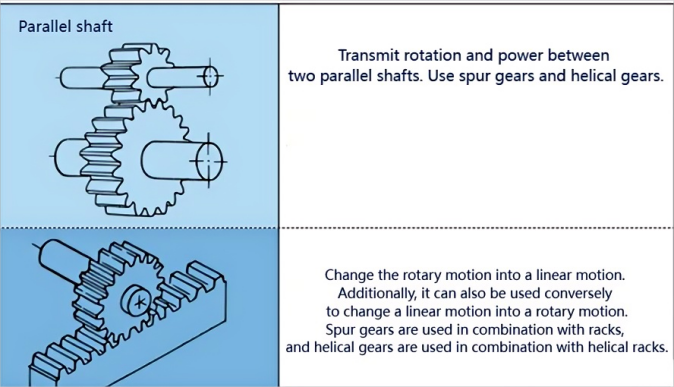
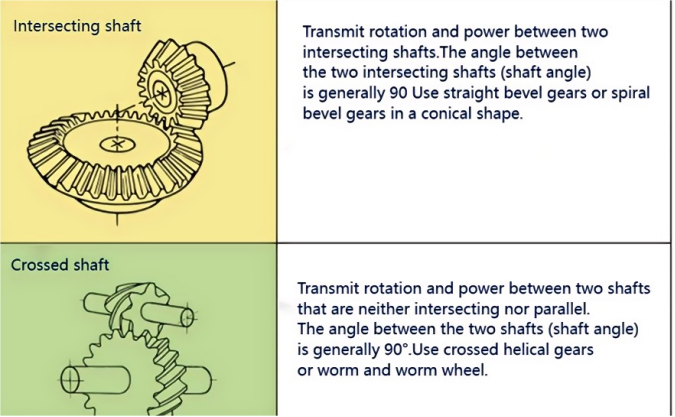
Existem vários tipos de engrenagens. O método mais comum de classificação é baseado no eixo da engrenagem. Geralmente, elas são divididas em três tipos: eixo paralelo, eixo intersectante e eixo cruzado. As engrenagens de eixo paralelo incluem engrenagens cilíndricas, engrenagens helicoidais, engrenagens internas, pinhões e pinhões helicoidais, entre outros. As engrenagens de eixo intersectante incluem engrenagens cônico-retas, engrenagens cônico-espiral, engrenagens cônico-zero, entre outras. As engrenagens de eixo cruzado incluem engrenagens helicoidais cruzadas, roda dentada de parafuso e parafuso, engrenagens hipoides, entre outras.
(Classificação e tipos de engrenagens).
|
Classificação de engrenagens |
Tipo de engrenagens |
Eficiência ((%) |
|
Eixo paralelo |
Engrenagem Espurá |
98.0-99.5 |
|
Cadeira |
||
|
Engrenagem interna |
||
|
Engrenagem Helicoidal |
||
|
Rack helicoidal |
||
|
Engrenagem em formato de losango |
||
|
Eixo intersectante |
Engrenagem cônico retilínea |
98,0-99,0 |
|
Engrenagem espiral cônica |
||
|
Engrenagem cônica de zero graus |
||
|
Eixo cruzado |
Engrenagens helicoidais cruzadas |
70.0-95.0 |
|
Vermelho cilíndrico e roda de verme |
30.0-80.0 |
As eficiências listadas nesta tabela são eficiências de transmissão e não incluem perdas de rolamentos, agitação da lubrificação, etc. O emparelhamento de pares de engrenagens em eixos paralelos e intersectantes é basicamente de deslizamento, e o deslizamento relativo é muito pequeno, portanto, a eficiência é alta. Para engrenagens helicoidais cruzadas, verme e roda de verme e outros pares de engrenagens com eixos cruzados, como a rotação é gerada por meio de deslizamento relativo para alcançar a transmissão de potência, a influência do atrito é muito grande, e a eficiência de transmissão diminui em comparação com outras engrenagens. A eficiência de uma engrenagem é a eficiência de transmissão da engrenagem sob condições normais de montagem. Se houver montagem incorreta, especialmente quando a distância de montagem dos pinhões cônico estiver incorreta e houver erro no ponto de interseção cônico, sua eficiência diminuirá significativamente.
2.0 O papel das engrenagens Engrenagens
As engrenagens devem ser usadas em pares para serem eficazes
2.1 Transmitir a força do movimento mecânico: Há muitas engrenagens em muitos carros. Essas engrenagens podem ajudar no funcionamento dos carros ou de várias outras máquinas. Por exemplo, como o dispositivo de troca de marcha nos carros e nas caixas redutoras industriais, etc. Com o papel das engrenagens, elas podem operar normalmente.
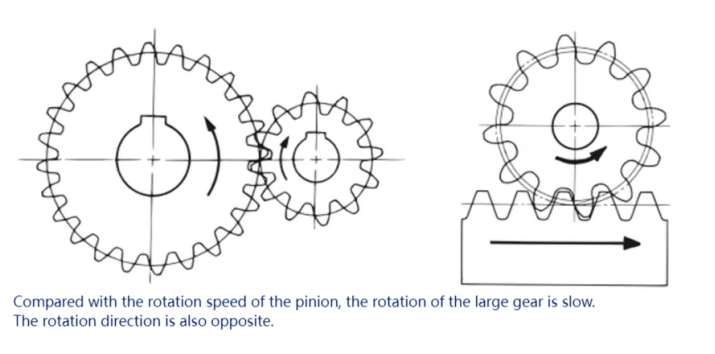
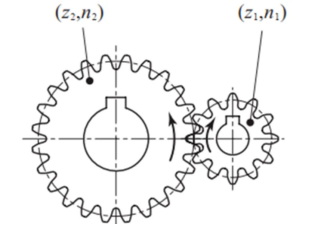
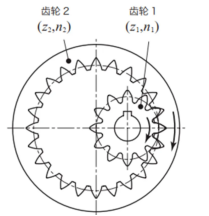
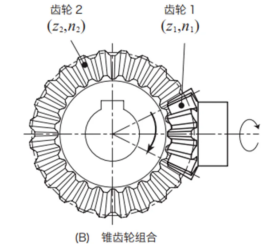
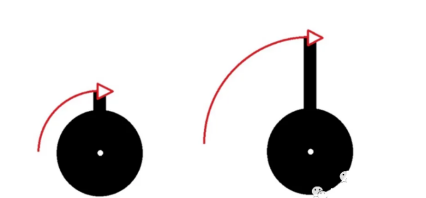
2.2 Alterar a direção do movimento:
A figura a seguir mostra a lei de mudança da direção do movimento por diferentes combinações de engrenagens.
2.3 Alterar a velocidade do movimento: Instalar a combinação de engrenagens grandes e pequenas na máquina pode fazer com que a máquina acelere ou desacelere rapidamente, como caixas redutoras e dispositivos de aceleração.
2.4 Altere o torque ou torção: A combinação de engrenagens grandes e pequenas alterará o torque gerado pelas engrenagens; (Há uma explicação detalhada no terceiro ponto abaixo.)
2, Razões de Transmissão e Direções de Rotação de Trechos de Engrenagens
A razão de transmissão é a relação entre as velocidades angulares de dois componentes rotativos em um mecanismo, também conhecida como razão de velocidade. A razão de transmissão entre o componente a e o componente b é i = ωa/ωb = na/nb, onde ωa e ωb são as velocidades angulares dos componentes a e b respectivamente (radianos por segundo); na e nb são as velocidades de rotação dos componentes a e b respectivamente (rotações por minuto).
1.Mecanismo de engrenagem de único estágio: Um conjunto de engrenagens formado após o emparelhamento de um par de engrenagens é chamado de mecanismo de engrenagem de único estágio.
Seja o número de dentes da engrenagem motriz do mecanismo de engrenagem de único estágio z1, o número de rotações n1, o número de dentes da engrenagem impulsionada z2 e o número de rotações n2. A equação de cálculo da razão de transmissão é a seguinte:
Razão de transmissão = z2/z1 = n1/n2
De acordo com o valor da razão de transmissão, o mecanismo de engrenagem de único estágio pode ser dividido em três categorias:
Relação de transmissão < 1, mecanismo de engrenagem de aumento de velocidade, n1 < n2
Relação de transmissão = 1, mecanismo de engrenagem de velocidade constante, n1 = n2
Relação de transmissão > 1, mecanismo de engrenagem redutora de velocidade, n1 > n2
2.0 Mecanismo de engrenagem em duas etapas: O mecanismo de engrenagem em duas etapas é composto por dois conjuntos de mecanismos de engrenagem em uma única etapa.
A figura a seguir mostra a estrutura do mecanismo de engrenagem de duas etapas.
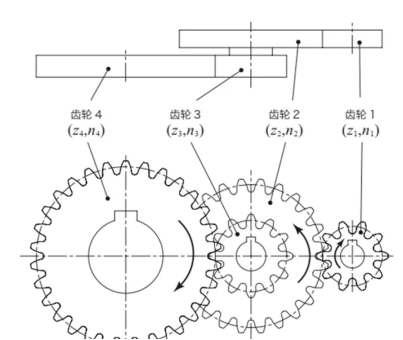
Razão de transmissão = z2/z1 * z4/z3 = n1/n2 * n3/n4.
A seguir, há um exemplo de cálculo da razão de transmissão de um mecanismo de engrenagem de duas etapas.
|
Número de série |
Item |
Código |
Fórmula |
Exemplo de cálculo |
|
|
PINION |
Engrenagem grande |
||||
|
1 |
Número de dentes (primeira etapa da transmissão) |
Z1,Z2 |
Valor definido |
10 |
24 |
|
2 |
Número de dentes (engrenagem de segunda fase) |
Z3,24 |
12 |
30 |
|
|
3 |
Rotação (engrenagem 1) |
n1 |
1200 |
- |
|
|
4 |
Relação de transmissão (primeira etapa) |
i1 |
Z2/Z1 |
2.4 |
|
|
5 |
Relação de transmissão (segunda etapa) |
i2 |
Z4/Z3 |
2.5 |
|
|
6 |
Relação de transmissão |
eu |
i1×i2 |
6 |
|
|
7 |
Velocidade de rotação (engrenagens 2 e 3) |
n2 |
n1/i1 |
500 |
|
|
8 |
Velocidade de rotação (engrenagem 4) |
n4 |
n1/i |
- |
200 |
|
A unidade de velocidade rotacional é rpm. O valor definido é o valor pré-configurado pelo designer. |
|||||
3, Relação entre Torque, Potência e Velocidade Rotacional
Vamos primeiro olhar para algumas fórmulas e entendê-las passo a passo.
a. Na física, o momento da força, momento da força = força × braço da alavanca (linha reta). A fórmula para calcular o momento da força é M = L×F. A unidade do momento da força é Newton - metro, simplesmente chamado de N - m, com o símbolo N*m.
Braço da alavanca OA × força Fa = braço da alavanca OB × força Fb.
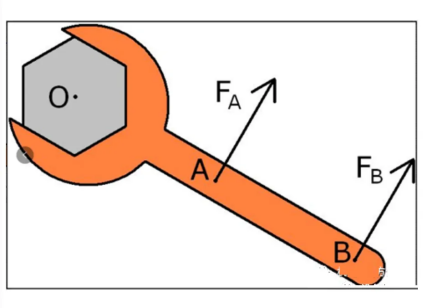
b. Em um estado rotacional, torque (um momento especial de força) = F (força) × r (raio de rotação), ou seja, o produto da força tangencial e o raio do círculo da força até o ponto de ação. A fórmula para calcular o torque é: M = F*r.
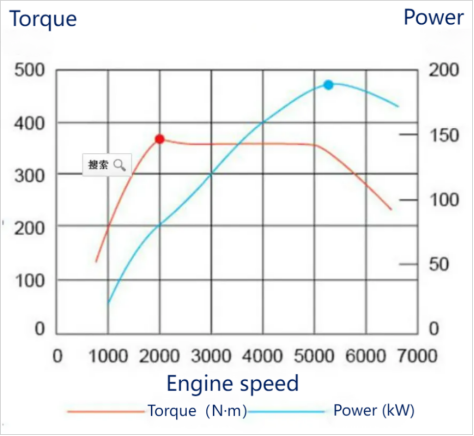
c. A relação entre torque e velocidade de rotação: T = 9550P / n, P = T * n / 9550; P é a potência em quilowatts (kW); T é o torque em Newton-metros (N·m); n é a velocidade de rotação em rotações por minuto (r/min). 9550 é uma constante.
d. A relação entre potência, torque e velocidade de rotação: Potência (kW) P = Torque (N·m) T × Velocidade de rotação (RPM) n/9550, ou seja, P = T*n/9550, o que pode ser compreendido com a seguinte figura.
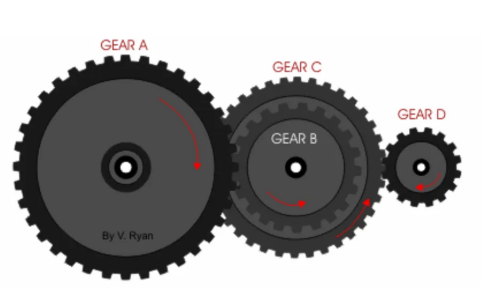
Como pode ser visto no diagrama de rotação da engrenagem, a potência permanece inalterada (ignorando perdas de transmissão), mas a velocidade de rotação diminui. De acordo com potência = torque × velocidade de rotação (*constante), o número de vezes que a velocidade de rotação na extremidade da roda é reduzida é o mesmo que o número de vezes que o torque na extremidade da roda é aumentado - este é o chamado "torque da roda".
e. A relação entre potência, torque e velocidade angular: Potência P = torque T × velocidade angular ω.
Porque potência P = trabalho W ÷ tempo t, e trabalho W = força F × distância s, então P = F×s/t = F×velocidade linear v. Aqui v é a velocidade linear. Em um motor, a velocidade linear v do virabrequim = a velocidade angular ω do virabrequim × o raio r do virabrequim.
Substituindo na fórmula acima dá: potência P = força F × raio r × velocidade angular ω. E força F × raio r = torque. Portanto, pode-se concluir que potência P = torque × velocidade angular ω. Então, a potência de um motor pode ser calculada a partir do torque e da velocidade de rotação.
Exemplos de imagens.
Relações complementares: As seguintes são para movimento circular uniforme.
1.Velocidade linear V = s/t = 2πR/T.
2.Velocidade angular ω = Φ/t = 2π/T = 2πf.
3.A relação entre velocidade linear e velocidade angular: Velocidade linear = velocidade angular × raio, V = ωR.
4.A relação entre velocidade angular e velocidade de rotação ω = 2πn (aqui, frequência e velocidade de rotação têm o mesmo significado).
5.Período e frequência T = 1/f.
Principais grandezas físicas e unidades: comprimento do arco (S): metro (m); ângulo (Φ): radiano (rad); frequência (f): hertz (Hz); período (T): segundo (s); velocidade de rotação (n): r/s; raio (R): metro (m); velocidade linear (V): m/s; velocidade angular (ω): rad/s.




