 EN
EN
 AR
AR
 FI
FI
 NL
NL
 DA
DA
 CS
CS
 PT
PT
 PL
PL
 NO
NO
 KO
KO
 JA
JA
 IT
IT
 HI
HI
 EL
EL
 FR
FR
 DE
DE
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SK
SK
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 FA
FA
 MS
MS
 HA
HA
 KM
KM
 LO
LO
 NE
NE
 PA
PA
 YO
YO
 MY
MY
 KK
KK
 SI
SI
 KY
KY

Niezastąpione biegi: Analiza ich kluczowych ról w systemach przekazywania ruchu
Biegi są kluczowe w układach przekazywania. W automatyce, odgrywają one podstawową rolę w skrzyni biegów. Mechaniczne skrzynie biegów wykorzystują biegi w przekładni. Różne kombinacje biegów umożliwiają dostosowanie prędkości i momentu obrotowego do różnych warunków jazdy, takich jak przyspieszanie, jednolita jazda czy wspinanie się. Biegi śrubowe zmniejszają hałas i drgania, zapewniając większy komfort jazdy.
∂ Rodzaje i funkcje biegów
1.0. Rodzaje biegów
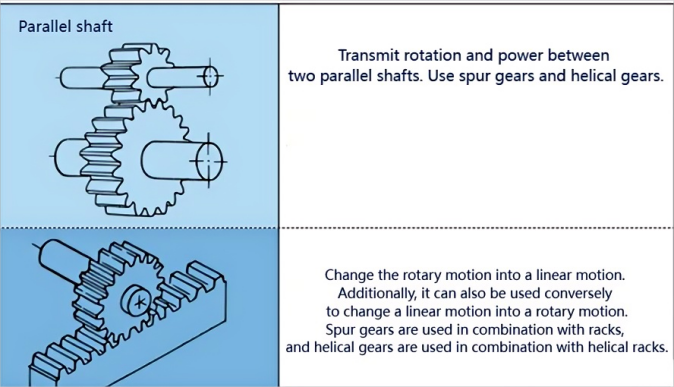
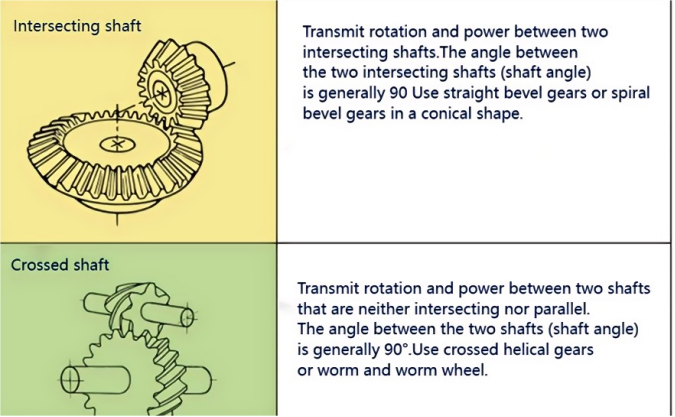
Istnieje wiele rodzajów biegów. Najczęstsza metoda klasyfikacji opiera się na osi biegu. Ogólnie dzielą się na trzy grupy: biegi o osi równoległej, przecinającej się oraz skrzyżowanej. Biegi o osi równoległej obejmują biegi proste, śrubowe, wewnętrzne, tasiemcze oraz tasiemcze śrubowe itp. Biegi o osi przecinającej się obejmują biegi stożkowe proste, śrubowe, zero - stopniowe stożkowe itp. Biegi o osi skrzyżowanej obejmują biegi śrubowe skrzyżowane, ślimak i koło ślimakowe, biegi hipoide itp.
(Klasyfikacja i rodzaje biegów).
|
Klasyfikacja zębów |
Rodzaje zębów |
Wydajność (%) |
|
Walec równoległy |
Koło zębate proste |
98.0-99.5 |
|
Stojak |
||
|
Narzędzia wewnętrzne |
||
|
Biegunka śrubowa |
||
|
Wiertło skośne |
||
|
Bocznik w kształcie daszka |
||
|
Przecinające się wały |
Prosta zębówka stożkowa |
98.0-99.0 |
|
Koło zębate spiralno-kośne |
||
|
Zębatka stożkowa o kącie zero stopni |
||
|
Skrzyżowane wały |
Skrzyżowane zębate kółka śrubowe |
70.0-95.0 |
|
Worm cylndryczny i koło wormowe |
30.0-80.0 |
Efektywności wymienione w tej tabeli to efektywności transmisji i nie uwzględniają strat z łożysk, mieszania smarowania itp. Połączenie par biegłych na osiach równoległych i przecinających się jest podstawowo toczne, a względne suwenie są bardzo małe, więc efektywność jest wysoka. Dla zębów krzyżowych, śrubowych oraz śrubowych i koła śrubowego oraz innych par zębów krzyżowych, ponieważ obroty powstają poprzez względną suwenię w celu przekazania mocy, wpływ tarcia jest bardzo duży, a efektywność transmisji maleje w porównaniu do innych zębów. Efektywność zęba to efektywność transmisji zęba przy normalnych warunkach montażu. Jeśli montaż jest niepoprawny, zwłaszcza gdy odległość montażu między zębami stożkowymi jest błędna i występuje błąd w punkcie przecięcia stożków, ich efektywność znacząco zmniejszy się.
2.0 Rolą zębów Zęby
Zęby muszą być używane parami, aby były skuteczne
2.1 Przekazyj moc ruchu mechanicznego: Istnieje wiele biegów w wielu samochodach. Te biegi mogą wspomagać pracę samochodów lub różnych innych maszyn. Na przykład, jak urządzenie do przekształcania biegów w samochodach i przemysłowych zredukowanych skrzynek biegów itp. Dzięki roli biegów mogą one działać normalnie.
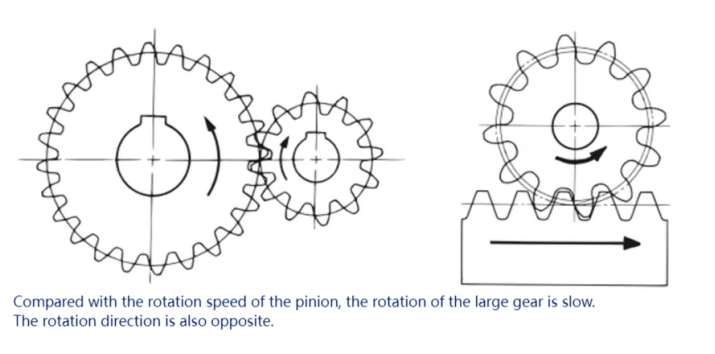
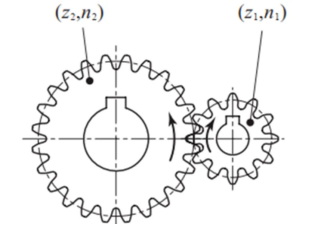
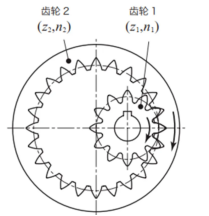
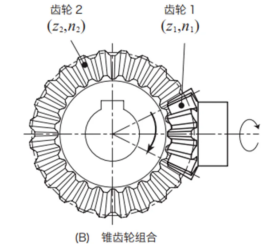
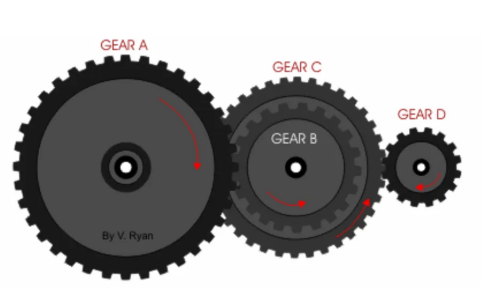
2.2 Zmień kierunek ruchu:
Poniższy rysunek przedstawia zasady zmiany kierunku ruchu za pomocą różnych kombinacji biegów.
2.3 Zmień prędkość ruchu: Montowanie kombinacji dużych i małych zębów na maszynie pozwala na szybkie przyspieszenie lub zwalnianie maszyny, takie jak reduktery i urządzenia przyspieszające.
2.4 Zmień moment obrotowy lub skręcenie: Kombinacja dużych i małych zębów zmieni moment obrotowy wydawany przez zęby; (Szczegółowe wyjaśnienie znajduje się w trzecim punkcie poniżej.)
2, Stosunek przekładniowy i kierunki obrotu łańcucha zębaczka
Stosunek przekładniowy to stosunek prędkości kątowych dwóch składników obrotowych w mechanizmie, nazywany również stosunkiem prędkości. Stosunek przekładniowy między elementem a i b wynosi i = ωa/ωb = na/nb, gdzie ωa i ωb to prędkości kątowe elementów a i b odpowiednio (radiany na sekundę); na i nb to prędkości obrotowe elementów a i b odpowiednio (obroty na minutę).
1.Jednoetapowy mechanizm przekładni kołesowej: Połączenie dwóch kołес zębatych tworzy jednoetapowy mechanizm przekładni kołesowej.
Niech liczba zębów napędzającego koła w jednoetapowym mechanizmie przekładni wynosi z1, a liczba obrotów n1, liczba zębów koła napędzanego z2, a liczba obrotów n2. Równanie obliczania współczynnika przekładni jest następujące:
Współczynnik przekładni = z2/z1 = n1/n2
Według wartości współczynnika przekładni, jednoetapowy mechanizm przekładni może być podzielony na trzy kategorie:
Stosunek przekładania < 1, mechanizm zwiększający prędkość, n1 < n2
Stosunek przekładania = 1, mechanizm o stałej prędkości, n1 = n2
Stosunek przekładania > 1, mechanizm zmniejszający prędkość, n1 > n2
2.0 Dwustopniowy mechanizm zębatkowy: Dwustopniowy mechanizm zębatkowy składa się z dwóch zestawów jednostopniowych mechanizmów zębatkowych.
Poniższy rysunek przedstawia strukturę mechanizmu zębaczowego dwustopniowego.
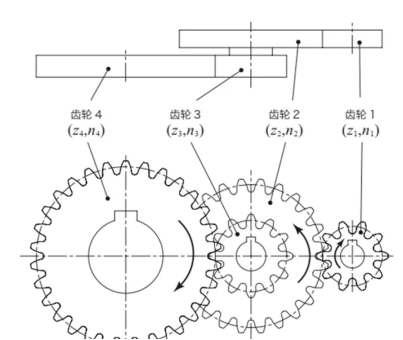
Stosunek przekazu = z2/z1 * z4/z3 = n1/n2 * n3/n4.
Poniżej znajduje się przykład obliczania stosunku przekazu mechanizmu zębaczowego dwustopniowego.
|
Numer seryjny |
Element |
Kod |
Formuła |
Przykład obliczeń |
|
|
PINION |
Duży ząb |
||||
|
1 |
Liczba zębów (pierwszy etap przekładni) |
Z1,Z2 |
Ustawiona wartość |
10 |
24 |
|
2 |
Liczba zębów (drugi etap przekładni) |
Z3,24 |
12 |
30 |
|
|
3 |
Obrót (bieg 1) |
n1 |
1200 |
- |
|
|
4 |
Stosunek przekładania (pierwszy etap) |
i1 |
Z2/Z1 |
2.4 |
|
|
5 |
Stosunek przekładania (drugi etap) |
i2 |
Z4/Z3 |
2.5 |
|
|
6 |
Stosunek przekazu |
i |
i1×i2 |
6 |
|
|
7 |
Prędkość obrotowa (źrednie 2 i 3) |
n2 |
n1/i1 |
500 |
|
|
8 |
Prędkość obrotowa (źrednie 4) |
n4 |
n1/i |
- |
200 |
|
Jednostką prędkości obrotowej jest obr/min. Wartość ustawiona to wartość zaprogramowana przez projektanta. |
|||||
3, Związek między momentem obrotowym, mocą i prędkością obrotową
Przyjrzyjmy się najpierw niektórym wzorom i zrozumiemy je krok po kroku.
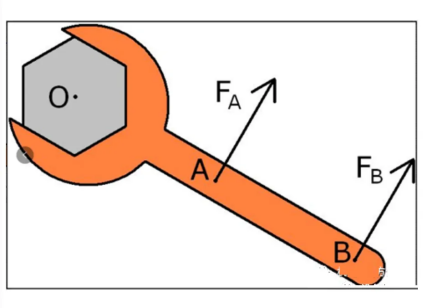
a. W fizyce, moment siły, moment siły = siła × ramię wahadła (prosta linia). Wzór na obliczanie momentu siły to M = L×F. Jednostką momentu siły jest newton-metr, po prostu nazywany N-m, z symbolem N*m.
Ramię wahadła OA × siła Fa = ramię wahadła OB × siła Fb.
b. W stanie obrotowym, moment siły (specjalny moment siły) = F (siła) × r (promień obrotu), czyli iloczyn siły stycznej i promienia okręgu od siły do punktu działania. Formuła do obliczania momentu siły to: M = F*r.
c. Związek między momentem obrotowym a prędkością obrotową: T = 9550P / n, P = T * n / 9550; P to moc w kilowattach (kW); T to moment obrotowy w newtonach-metrach (N·m); n to prędkość obrotowa w obrotach na minutę (obr/min). 9550 to stała.
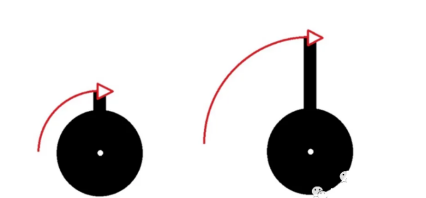
d. Związek między mocą, momentem obrotowym i prędkością obrotową: Moc (kW) P = Moment obrotowy (N·m) T × Prędkość obrotowa (obr/min) n/9550, czyli P = T*n/9550, co można zrozumieć na podstawie poniższego rysunku.
Jak widać z diagramu obrotów bieguna, moc pozostaje niezmieniona (pomijając straty transmisji), ale prędkość obrotowa jest zmniejszana. Według wzoru moc = moment obrotowy × prędkość obrotowa (*stała), liczba razy, o którą zmniejsza się prędkość obrotowa na końcu koła, jest taka sama jak liczba razy, o którą zwiększa się moment na końcu koła - to tak zwany "moment koła".
e. Związek między mocą, momentem obrotowym i prędkością kątową: Moc P = moment T × prędkość kątowa ω.
Ponieważ moc P = praca W ÷ czas t, a praca W = siła F × odległość s, więc P = F×s/t = F×prędkość liniowa v. Tu v to prędkość liniowa. W silniku prędkość liniowa v wałka = prędkość kątowa ω wałka × promień r wałka.
Podstawiając do powyższego wzoru otrzymujemy: moc P = siła F × promień r × prędkość kątowa ω. A siła F × promień r = moment obrotowy. Zatem można wnioskować, że moc P = moment obrotowy × prędkość kątowa ω. Więc moc silnika może być obliczona na podstawie momentu obrotowego i prędkości obrotowej.
Przykłady ilustracji.
Dodatkowe zależności: Poniżej znajdują się wzory dla ruchu jednostajnego kołowego.
1. Prędkość liniowa V = s/t = 2πR/T.
2. Prędkość kątowa ω = Φ\/t = 2π\/T = 2πf.
3. Związek między prędkością liniową a prędkością kątową: Prędkość liniowa = prędkość kątowa × promień, V = ωR.
4. Związek między prędkością kątową a liczbą obrotów ω = 2πn (tutaj częstotliwość i liczba obrotów mają to samo znaczenie).
5. Okres i częstotliwość T = 1\/f.
Podstawowe wielkości fizyczne i jednostki: Długość łuku (S): metr (m); kąt (Φ): radian (rad); częstotliwość (f): herc (Hz); okres (T): sekunda (s); prędkość obrotowa (n): obr/s; promień (R): metr (m); prędkość liniowa (V): m/s; prędkość kątowa (ω): rad/s.




