 EN
EN
 AR
AR
 FI
FI
 NL
NL
 DA
DA
 CS
CS
 PT
PT
 PL
PL
 NO
NO
 KO
KO
 JA
JA
 IT
IT
 HI
HI
 EL
EL
 FR
FR
 DE
DE
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SK
SK
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 FA
FA
 MS
MS
 HA
HA
 KM
KM
 LO
LO
 NE
NE
 PA
PA
 YO
YO
 MY
MY
 KK
KK
 SI
SI
 KY
KY

ਅਵਸ਼ਯ ਗੇਅਰ: ਟਰਾਂਸਮਿਸ਼ਨ ਸਿਸਟਮਾਂ ਵਿੱਚ ਉਨ੍ਹਾਂ ਦੀਆਂ ਮੁੱਖ ਭੂਮਿਕਾਵਾਂ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ
ਗੀਅਰ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਸਿਸਟਮਾਂ ਵਿੱਚ ਜ਼ਿੰਦਾਈ ਹਨ। ਕਾਰ ਉਪਯੋਗ ਵਿੱਚ, ਇਹ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਵਿੱਚ ਮੁੱਖ ਭੂਮਿਕਾ ਨਿਬਾਹਦੇ ਹਨ। ਮੈਨੂਅਲ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਗੀਅਰਬਾਕਸ ਵਿੱਚ ਗੀਅਰ ਦੀ ਵਰਤੋਂ ਕਰਦੀ ਹੈ। ਵੱਖ-ਵੱਖ ਗੀਅਰ ਸੰਘਣਾਂ ਦੀ ਮਦਦ ਨਾਲ ਵੱਖ ਵੱਖ ਡਰਾਈਵਿੰਗ ਸਥਿਤੀਆਂ ਲਈ ਚਲਾ ਅਤੇ ਟੋਕ ਦੀ ਸਫ਼ਤ ਕਰਨੀ ਹੈ, ਜਿਵੇਂ ਕਿ ਤੇਜੀ ਨਾਲ ਚਲਣਾ, ਸਹਜ ਚਲਣਾ ਜਾਂ ਚੜ੍ਹਣਾ। ਹੇਲਿਕਲ ਗੀਅਰ ਨੂੰ ਚਲਾਉਣ ਦੀ ਸਭ ਤੋਂ ਵਧੀਆ ਸਹੁਲਤ ਪ੍ਰਦਾਨ ਕਰਦੇ ਹਨ ਅਤੇ ਸ਼ੌਰਾਸ਼ਟਰ ਅਤੇ ਵਿਬ੍ਰੇਸ਼ਨ ਨੂੰ ਘਟਾਉਂਦੇ ਹਨ।
ਇੱਕ, ਗੀਅਰ ਦੀਆਂ ਕਿਸਮਾਂ ਅਤੇ ਫ਼ੰਕਸ਼ਨ
1.0. ਗੀਅਰ ਦੀਆਂ ਕਿਸਮਾਂ
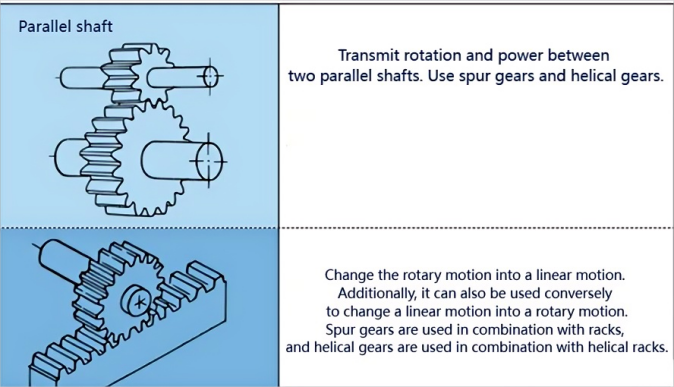
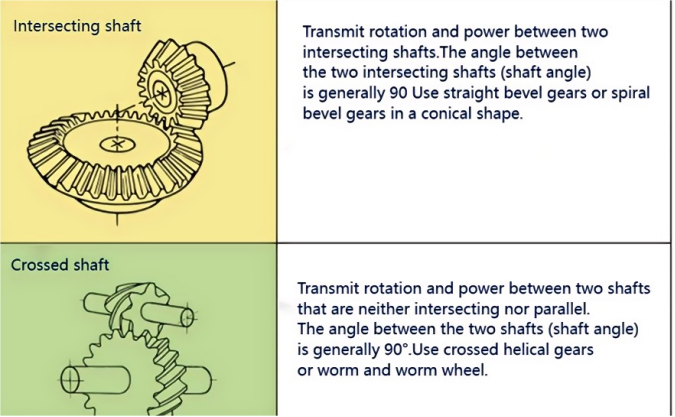
ਗੀਅਰ ਦੀਆਂ ਬਹੁਤ ਸਾਰੀਆਂ ਕਿਸਮਾਂ ਹਨ। ਸਭ ਤੋਂ ਵਧੀਆ ਵਰਗੀਕਰਣ ਤਰੀਕਾ ਗੀਅਰ ਅੱਖਰ ਉੱਤੇ ਆਧਾਰਿਤ ਹੈ। ਆਮ ਤੌਰ 'ਤੇ, ਇਹ ਤਿੰਨ ਕਿਸਮਾਂ ਵਿੱਚ ਵੰਡੇ ਜਾਂਦੇ ਹਨ: ਸਮਾਂਤਰ - ਅੱਖਰ, ਖਿੰਚਦੇ - ਅੱਖਰ, ਅਤੇ ਕਰੋਸਡ - ਅੱਖਰ। ਸਮਾਂਤਰ - ਅੱਖਰ ਗੀਅਰ ਵਿੱਚ ਸਪਰ ਗੀਅਰ, ਹੇਲਿਕਲ ਗੀਅਰ, ਅੰਦਰੂਨੀ ਗੀਅਰ, ਰੈਕਸ, ਅਤੇ ਹੇਲਿਕਲ ਰੈਕਸ ਸ਼ਾਮਲ ਹਨ ਆਦਿ। ਖਿੰਚਦੇ - ਅੱਖਰ ਗੀਅਰ ਵਿੱਚ ਸਟ੍ਰੈਟ ਬੀਵਲ ਗੀਅਰ, ਸਪਾਈਰਲ ਬੀਵਲ ਗੀਅਰ, ਜਿਰੋ - ਡਿਗਰੀ ਬੀਵਲ ਗੀਅਰ ਸ਼ਾਮਲ ਹਨ ਆਦਿ। ਕਰੋਸਡ - ਅੱਖਰ ਗੀਅਰ ਵਿੱਚ ਕਰੋਸਡ - ਹੇਲਿਕਲ ਗੀਅਰ, ਵੋਰਮ ਅਤੇ ਵੋਰਮ ਵਿਹਲ, ਹਾਇਪੋਇਡ ਗੀਅਰ ਸ਼ਾਮਲ ਹਨ ਆਦਿ।
(ਵਰਗੀਕਰਣ ਅਤੇ ਗਿਆਰਾਂ ਦੀ ਕਿਸਮਾਂ).
|
ਗਿਆਰਾਂ ਦਾ ਵਰਗੀਕਰਣ |
ਗਿਆਰਾਂ ਦੀ ਕਿਸਮ |
ਦक਼ਾਇਤ(%) |
|
ਸਮਾਂਤਰ ਧੁਰ |
ਸਪਰ ਗਿਆਰ |
98.0-99.5 |
|
ਰੈਕ |
||
|
ਅੰਦਰੂਨੀ ਗਿਆਰ |
||
|
ਹੇਲੀਕਲ ਗੇਅਰ |
||
|
ਹੇਲਿਕਲ ਰੈਕ |
||
|
ਹੈਰਿੰਗਬੋਨ ਗਿਆਰ |
||
|
ਖਾਸਮਿਲ ਧੱਜ |
ਸਿੱਧਾ ਬੇਵਲ ਗੇਅਰ |
98.0-99.0 |
|
ਸਪਿਰਲ ਬੇਵਲ ਗੇਅਰ |
||
|
ਸਿਰੋਂ ਡਿਗਰੀ ਬੀਵਲ ਗਿਆਰ |
||
|
ਖਾਸਮਿਲ ਧੱਜ |
ਖਾਸਮਿਲ ਹੈਲਿਕਲ ਗਿਆਰ |
70.0-95.0 |
|
ਗੇਰ ਅਤੇ ਗੇਰ ਵਿਹਾਰੀ |
30.0-80.0 |
ਇਸ ਟੈਬਲ ਵਿੱਚ ਦਿੱਤੀਆਂ ਦकਾਇਬਾਨ ਸਹੀ ਰੂਪ ਵਿੱਚ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਦਕਾਇਬਾਨ ਹਨ ਅਤੇ ਬੇਅੰਗ, ਸਟਾਰਿੰਗ ਲੁਬ੍ਰਿਕੇਸ਼ਨ ਜਾਂ ਇੱਕ ਵੀ ਹੋਰ ਘਟਕਾਂ ਤੋਂ ਬਾਹਰ ਹਨ। ਪੈਰਾਲਾਕਸ ਅਕਸ਼ਾਂ ਅਤੇ ਖਿੰਚੇ ਹੋਏ ਅਕਸ਼ਾਂ ਉੱਤੇ ਗੇਰ ਜੋੜੇ ਦਾ ਮੈਸ਼ਿੰਗ ਮੁੱਖ ਭੌਮੀ ਰੂਪ ਵਿੱਚ ਰੋਲਿੰਗ ਹੈ, ਅਤੇ ਸਹਿਯੋਗੀ ਸਲਾਈਡਿੰਗ ਬਹੁਤ ਛੋਟਾ ਹੈ, ਇਸ ਲਈ ਦਕਾਇਬਾਨ ਉੱਚ ਹੈ। ਕਰੋਸਡ ਅਕਸ਼ਾਂ ਲਈ ਹੈਲਿਕਲ ਗੇਰ ਅਤੇ ਗੇਰ ਅਤੇ ਗੇਰ ਵਿਹਾਰੀ ਅਤੇ ਇੱਕ ਵੀ ਹੋਰ ਕਰੋਸਡ ਅਕਸ਼ਾਂ ਗੇਰ ਜੋੜੇ ਲਈ, ਕਾਰਨ ਕਿ ਘੁਮਾਵ ਸਹਿਯੋਗੀ ਸਲਾਈਡਿੰਗ ਦੀ ਮਧਿਆਮਤ ਨਾਲ ਪਾਵਰ ਟ੍ਰਾਂਸਫ਼ਰ ਹੋਣ ਲਈ ਉਤਪਨਨ ਹੁੰਦਾ ਹੈ, ਸਹਿਯੋਗੀ ਸਲਾਈਡਿੰਗ ਦੀ ਪ੍ਰਭਾਵ ਬਹੁਤ ਵੱਡੀ ਹੈ, ਅਤੇ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਦਕਾਇਬਾਨ ਇਨ੍ਹਾਂ ਗੇਰਾਂ ਦੀ ਤੁਲਨਾ ਵਿੱਚ ਘਟ ਜਾਂਦੀ ਹੈ। ਇੱਕ ਗੇਰ ਦੀ ਦਕਾਇਬਾਨ ਸਹੀ ਜੋੜ ਸਥਿਤੀਆਂ ਵਿੱਚ ਗੇਰ ਦੀ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਦਕਾਇਬਾਨ ਹੈ। ਜੇ ਇੰਸਟਾਲੇਸ਼ਨ ਗਲਤ ਹੋਵੇ, ਵਿਸ਼ੇਸ਼ ਤੌਰ 'ਤੇ ਜਦੋਂ ਬੀਵਲ ਗੇਰ ਜੋੜ ਦੁਰਦਸ਼ਤੀ ਗਲਤ ਹੋਵੇ ਅਤੇ ਕੋਣੀ ਖਿੰਚੇ ਹੋਏ ਬਿੰਦੂ ਵਿੱਚ ਗਲਤੀ ਹੋਵੇ, ਤਾਂ ਇਸ ਦੀ ਦਕਾਇਬਾਨ ਮਾਹਿਲਾ ਢਾਲ ਘਟ ਜਾਂਦੀ ਹੈ।
2.0 ਗੇਰਾਂ ਦਾ ਕਾਰਜ ਗੇਰਾਂ
ਗੀਅਰ ਕਾਰਜ ਨੂੰ ਪੂਰਾ ਕਰਨ ਲਈ ਜੋੜੇ ਵਿੱਚ ਵਰਤੇ ਜਾਣ ਗਏ ਹਨ
2.1 ਯਾਂਤਰਿਕ ਚਾਲ ਦੀ ਸ਼ਕਤੀ ਨੂੰ ਸਫ਼ਟ ਕਰਨਾ: ਬਹੁਤ ਸਾਰੀਆਂ ਗਾਡੀਆਂ ਉੱਤੇ ਬਹੁਤ ਸਾਰੀਆਂ ਗੀਅਰ ਹੁੰਦੀਆਂ ਹਨ। ਇਹ ਗੀਅਰ ਗਾਡੀਆਂ ਜਾਂ ਬਿਨਤੀ ਹੋਰ ਮਸ਼ੀਨਾਂ ਦੀ ਕਾਰਜਸ਼ੀ ਨੂੰ ਸਹੀ ਕਰ ਸਕਦੀਆਂ ਹਨ। ਉਦਾਹਰਣ ਦੇ ਤੌਰ ਤੇ, ਗਾਡੀਆਂ ਉੱਤੇ ਚੜ੍ਹਾਉਣ ਲਈ ਉਪਕਰਣ ਅਤੇ ਔਧਿਕ ਘਟਾਉ ਬਕਸ਼ ਆਦਿ। ਗੀਅਰ ਦੀ ਭੂਮਿਖਾ ਨਾਲ, ਉਹ ਸਹੀ ਤਰੀਕੇ ਨਾਲ ਚਲਦੀਆਂ ਹਨ।
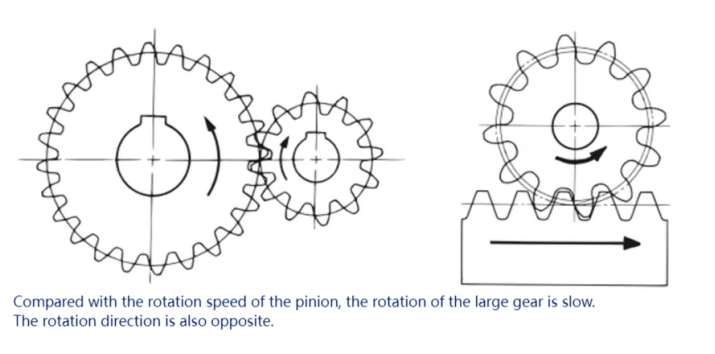
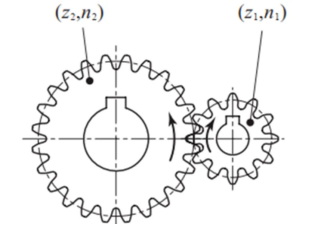
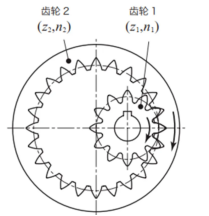
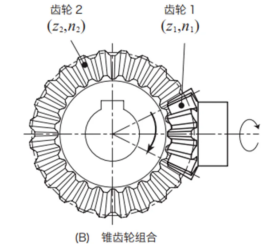
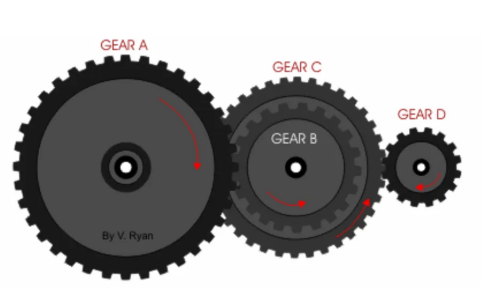
2.2 ਚਾਲ ਦੇ ਦਿਸ਼ਾ ਬਦਲਣਾ:
ਹੇਠ ਲਿਖੇ ਚਿੱਤਰ ਵੱਖ-ਵੱਖ ਗੀਅਰ ਜੋੜੇ ਦੀ ਮਦਦ ਨਾਲ ਚਾਲ ਦੀ ਦਿਸ਼ਾ ਬਦਲਣ ਦੀ ਨਿਯਮ ਦਿਖਾਉਂਦਾ ਹੈ।
2.3 ਗਤੀ ਦੀ ਰफ਼ਤਾਰ ਬਦਲੋ: ਮਸ਼ੀਨ 'ਤੇ ਵੱਡੇ ਅਤੇ ਛੋਟੇ ਗਿਆਰਾਂ ਦੀ ਕੰਬੈਨੇਸ਼ਨ ਇੰਸਟਾਲ ਕਰਨ ਦੁਆਰਾ ਮਸ਼ੀਨ ਨੂੰ ਜਲਦੀ ਤੇਜ਼ ਜਾਂ ਧੀਮੀ ਕਰਨਾ ਸੰਭਵ ਹੁੰਦਾ ਹੈ, ਜਿਵੇਂ ਕਿ ਰਿਡੂਸ਼ਨ ਬਾਕਸ ਅਤੇ ਟੂਰਾਂ ਡਿਵਾਇਸ।
2.4 ਟੋਰਕ ਜਾਂ ਟਵਿਸਟ ਬਦਲੋ: ਵੱਡੇ ਅਤੇ ਛੋਟੇ ਗਿਆਰਾਂ ਦੀ ਕੰਬੈਨੇਸ਼ਨ ਗਿਆਰਾਂ ਦੁਆਰਾ ਬਾਹਰ ਨਿਕਲਣ ਵਾਲੀ ਟੋਰਕ ਨੂੰ ਬਦਲ ਦੇਗੀ; (ਹੇਠਾਂ ਤੀਜੇ ਪੰਕਟ ਵਿੱਚ ਵਿਸਤਾਰ ਨਾਲ ਸਮਝਾਏ ਗਏ ਹਨ।)
ਦੂਜਾ ਗੇਰ ਸਿਸਟਮ ਦੀਆਂ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਗੁਣਾਂਕਾਂ ਅਤੇ ਘੁਮਾਵ ਦਿਸ਼ਾਵਾਂ
ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਗੁਣਾਂਕ ਇੱਕ ਮੈਕੈਨਿਜ਼ਮ ਵਿੱਚ ਦੋ ਘੁਮ ਰਹੇ ਘੱਟੀਆਂ ਦੀਆਂ ਕੌਣਾਈ ਵੇਗਾਂ ਦਾ ਗੁਣਾਂਕ ਹੁੰਦਾ ਹੈ, ਜਿਸਨੂੰ ਵੇਗ ਗੁਣਾਂਕ ਵਜੋਂ ਵੀ ਜਾਣਿਆ ਜਾਂਦਾ ਹੈ। ਘੱਟੀ a ਅਤੇ ਘੱਟੀ b ਦਾ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਗੁਣਾਂਕ i = ωa/ωb = na/nb ਹੁੰਦਾ ਹੈ, ਜਿੱਥੇ ωa ਅਤੇ ωb ਘੱਟੀ a ਅਤੇ b ਦੇ ਕੌਣਾਈ ਵੇਗ ਹਨ (ਰੇਡੀਅਨਸ ਪ੍ਰ ਸੈਕਨਡ); na ਅਤੇ nb ਘੱਟੀ a ਅਤੇ b ਦੇ ਘੁਮਾਵ ਦੇ ਵੇਗ ਹਨ (ਘੁੰਤੀਵਾਰ ਫ਼ਰੀਕਵੈਂਸੀ).
1.ਇਕ-ਸਟੇਜ ਗੇਰ ਮੈਕੈਨਿਜ਼ਮ: ਇੱਕ ਜੋੜੀ ਗੇਰ ਨੂੰ ਜੜਨ ਤੋਂ ਬਾਅਦ ਬਣਨ ਵਾਲਾ ਗੇਰ ਸਿਸਟਮ ਇਕ ਇਕ-ਸਟੇਜ ਗੇਰ ਮੈਕੈਨਿਜ਼ਮ ਕਿਹਾ ਜਾਂਦਾ ਹੈ।
ਇਕ ਇਕ-ਸਟੇਜ ਗੇਰ ਮੈਕੈਨਿਜ਼ਮ ਦੀ ਗੇਰ ਦੀ ਦੰਤਾਂ ਦੀ ਗਿਣਤੀ z1 ਹੋਵੇ, ਘੁਮਾਵਾਂ ਦੀ ਗਿਣਤੀ n1 ਹੋਵੇ, ਪ੍ਰਭਾਵਿਤ ਗੇਰ ਦੀ ਦੰਤਾਂ ਦੀ ਗਿਣਤੀ z2 ਹੋਵੇ ਅਤੇ ਘੁਮਾਵਾਂ ਦੀ ਗਿਣਤੀ n2 ਹੋਵੇ। ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਗੁਣਾਂਕ ਦੀ ਗਣਨਾ ਇਸ ਤਰ੍ਹਾਂ ਹੁੰਦੀ ਹੈ:
ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਅਨੁਪਤੀ = z2/z1 = n1/n2
ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਅਨੁਪਤੀ ਦੇ ਮੁੱਲ ਅਨੁਸਾਰ, ਇਕ-ਸਟੇਜ ਗਿਆਰ ਮਿਕਨਿਜ਼ਮ ਨੂੰ ਤਿੰਨ ਕੈਟਿਗਰੀਆਂ ਵਿੱਚ ਵੰਡਿਆ ਜਾ ਸਕਦਾ ਹੈ:
ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਅਨੁਪਤੀ < 1, ਵੇਗ ਵਧਾਉਣ ਵਾਲਾ ਗਿਆਰ ਮਿਕਨਿਜ਼ਮ, n1 < n2
ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਅਨੁਪਤੀ = 1, ਸਥਿਰ-ਵੇਗ ਗਿਆਰ ਮਿਕਨਿਜ਼ਮ, n1 = n2
ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਅਨੁਪਤੀ > 1, ਵੇਗ ਘਟਾਉਣ ਵਾਲਾ ਗਿਆਰ ਮਿਕਨਿਜ਼ਮ, n1 > n2
2.0 ਦੋ ਚਰਾਂਗੀ ਗਿਆਰ ਮਿਕਨਿਜ਼ਮ: ਦੋ ਚਰਾਂਗੀ ਗਿਆਰ ਮਿਕਨਿਜ਼ਮ ਦੋ ਸੈਟਾਂ ਦੀਆਂ ਇਕ ਚਰਾਂਗੀ ਗਿਆਰ ਮਿਕਨਿਜ਼ਮਾਂ ਤੋਂ ਬਣੀ ਹੁੰਦੀ ਹੈ।
ਹੇਠਾਂ ਦਾ ਚਿੱਤਰ ਦੋ ਚਰਾਂਗੀ ਗਿਆਰ ਮਿਕਨਿਜ਼ਮ ਦੀ ਸਥਿਤੀ ਦਰਸਾਉਂਦਾ ਹੈ।
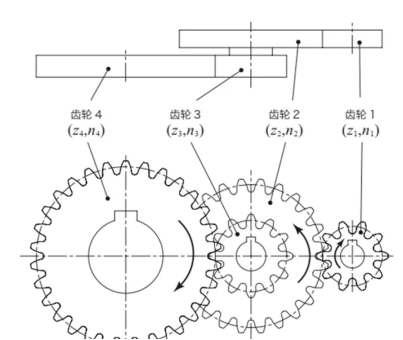
ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਗੁਣਾਂਕ = z2/z1 * z4/z3 = n1/n2 * n3/n4.
ਹੇਠਾਂ ਦੋ ਚਰਾਂਗੀ ਗਿਆਰ ਮਿਕਨਿਜ਼ਮ ਦੀ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਗੁਣਾਂਕ ਦੀ ਗਿਣਤੀ ਦੀ ਇੱਕ ਉਦਾਹਰਣ ਹੈ।
|
ਸੀਰੀਅਲ ਨੰਬਰ |
ਆਈਟੀਐਮ |
ਕੋਡ |
ਸੂਟ |
ਗਣਨਾ ਉਦਾਹਰਣ |
|
|
ਚਿੱਕਣੀ |
ਵੱਡੀ ਗਿਆਰ |
||||
|
1 |
ਦੰਤਾਂ ਦੀ ਗਿਣਤੀ (ਪਹਿਲੀ ਮੈਰੀ ਗਿਆਰ) |
Z1, Z2 |
ਮੁੱਲ ਸੈਟ ਕਰੋ |
10 |
24 |
|
2 |
ਦੰਤ ਦੀ ਗਿਣਤੀ (ਦੂਜੀ ਚਰਚਾ ਗੇਅਰ ਵਿੱਚ) |
Z3,24 |
12 |
30 |
|
|
3 |
ਘੁਮਾਵ (ਗੇਅਰ 1 ਵਿੱਚ) |
n1 |
1200 |
- |
|
|
4 |
ਟ੍ਰਾਨਸਮੈਸ਼ਨ ਗੁਣਾਂਕ (ਪਹਿਲੀ ਚਰਚਾ) |
i1 |
Z2/Z1 |
2.4 |
|
|
5 |
ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਗੁਣਾਂਕ (ਦੂਜੀ ਮੁਡ) |
i2 |
Z4/Z3 |
2.5 |
|
|
6 |
ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਗੁਣਾਂਕ |
i |
i1×i2 |
6 |
|
|
7 |
ਰਹਤ ਦੀ ਗਤੀ (ਗੇਅਰ 2 ਅਤੇ 3) |
ਐਨ2 |
n1/i1 |
500 |
|
|
8 |
ਰਹਤ ਦੀ ਗਤੀ (ਗੇਅਰ 4) |
ਨ4 |
n1\/i |
- |
200 |
|
ਗੁਰੂ ਦੀ ਘੁਮਾਵੀ ਚਲਾਅ ਦੀ ਇਕਾਈ ਰੇਡੀਅਨਸ ਪ੍ਰਤਿ ਮਿੰਟ ਹੈ। ਸੈਟ ਕੀਤਾ ਗਿਆ ਹੋਇਆ ਮੁੱਲ ਡਿਜ਼ਾਈਨਰ ਦੁਆਰਾ ਪੂਰਾ ਕੀਤਾ ਗਿਆ ਹੈ। |
|||||
ਤਿੰਨ, ਟੋਰਕ, ਪਾਵਰ ਅਤੇ ਰਾਤੀਵੀ ਚਲਾਅ ਦਾ ਸੰਬੰਧ
ਪਹਿਲਾਂ ਕਿਸੇ ਸੂਤਰਾਂ ਨੂੰ ਦੇਖੋ ਅਤੇ ਉਹਨਾਂ ਨੂੰ ਚਰਚਾ ਕਰੋ ਸਟੈਪ ਬਾਈ ਸਟੈਪ।
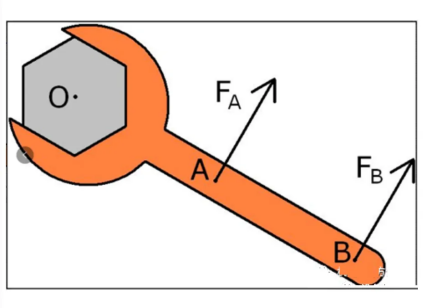
a. ਭੌਤਿਕ ਵਿਗਿਆਨ ਵਿੱਚ, ਫੋਰਸ ਦਾ ਮੋਮੈਂਟ, ਫੋਰਸ ਦਾ ਮੋਮੈਂਟ = ਫੋਰਸ × ਲੀਵਰ ਆਰਮ (ਸਹੀ ਰੇਖਾ). ਫੋਰਸ ਦੇ ਮੋਮੈਂਟ ਨੂੰ ਗਿਣਤੀ ਕਰਨ ਲਈ ਸੂਤਰ M = L×F ਹੈ। ਫੋਰਸ ਦੇ ਮੋਮੈਂਟ ਦੀ ਇਕਾਈ ਨਿਊਟਨ-ਮੀਟਰ ਹੈ, ਜਿਸਨੂੰ ਸਧਾਰਨ ਤੌਰ 'N-m' ਕਿਹਾ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਇਸ ਦਾ ਪ੍ਰਤੀਕ N*m ਹੈ।
ਫੌਲ ਬਾਜੁ OA × ਬਲ Fa = ਫੌਲ ਬਾਜੁ OB × ਬਲ Fb.
ਬ. ਇੱਕ ਘੁਮਾਵੀ ਅਵਸਥਾ ਵਿੱਚ, ਟੋਰਕ (ਇੱਕ ਵਿਸ਼ੇਸ਼ ਬਲ ਦਾ ਖੇਤਰ) = F (ਬਲ) × r (ਘੁਮਾਉ ਦਾ ਰੇਡੀਅਸ), ਜਾਂ ਕਿ ਸਪਰਸ਼ ਬਲ ਅਤੇ ਬਲ ਨੂੰ ਘੁਮਾਉ ਤੱਕ ਦੇ ਵਰਗ ਦੀ ਉਪਦ੍ਰਿਸ਼ਟੀ ਦਾ ਪ੍ਰਧਾਨ ਉਤਪਾਦ। ਟੋਰਕ ਦੀ ਗਣਨਾ ਲਈ ਸੂਤਰ ਹੈ: M = F*r.
ਸ. ਟੋਰਕ ਅਤੇ ਘੁਮਾਉ ਦੇ ਬਿੱਚ ਸੰਬੰਧ: T = 9550P\/n, P = T * n\/9550; P ਕਿਲੋਵਾਟ (kW) ਵਿੱਚ ਪਾਵਰ ਹੈ; T ਨਿਊਟਨ - ਮੀਟਰ (N·m) ਵਿੱਚ ਟੋਰਕ ਹੈ; n ਘੁਮਾਵਾਂ ਪ੍ਰਤि ਮਿੰਟ (r\/min) ਵਿੱਚ ਘੁਮਾਉ ਹੈ। 9550 ਇੱਕ ਸਥਿਰ ਹੈ।
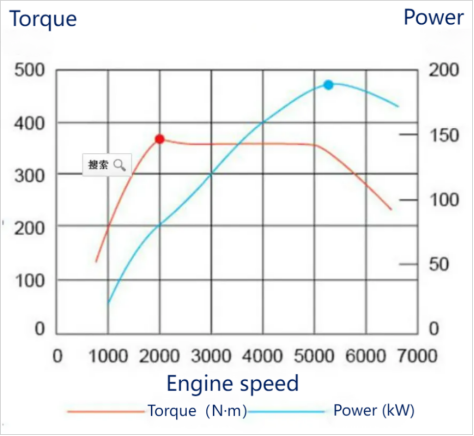
ਦ. ਪਾਵਰ ਅਤੇ ਟੋਰਕ ਅਤੇ ਘੁਮਾਉ ਦੇ ਬਿੱਚ ਸੰਬੰਧ: ਪਾਵਰ (kW) P = ਟੋਰਕ (N·m) T × ਘੁਮਾਉ (RPM) n\/9550, ਜਾਂ ਕਿ P = T*n\/9550, ਜਿਸਨੂੰ ਹੇਠਾਂ ਦੀ ਚਿੱਤਰ ਨਾਲ ਸਮਝਾ ਸਕਦਾ ਹੈ.
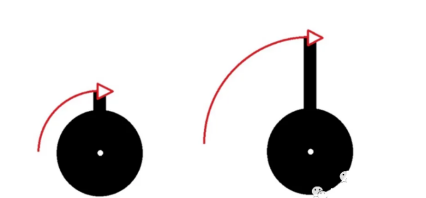
ਗਿਆਰ ਘੁਮਾਵ ਚਾਰਟ ਤੋਂ ਵੀ ਦਿਖਾਉਂਦਾ ਹੈ ਕਿ ਸ਼ਕਤੀ ਬਦਲੀ ਨਹੀਂ ਜਾਂਦੀ (ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਖੋਟੇ ਨੂੰ ਅਣਦੇਖਾ ਕਰਦੇ ਹੋਏ), ਪਰ ਘੁਮਾਵ ਦੀ ਰੇਟ ਘਟ ਜਾਂਦੀ ਹੈ। ਸ਼ਕਤੀ = ਟੋਕਿਊ ਘੁਮਾਵ ਦੀ ਰੇਟ (*ਥਿਰਾਂਕ) ਦੀ ਵज਼ਾਓਂ, ਘੁਮਾਵ ਦੀ ਰੇਟ ਚਕ ਦੀ ਪੈਰੀ ਤੇ ਕਿੰਨੀ ਵਾਰ ਘਟ ਜਾਂਦੀ ਹੈ ਉਸ ਦੀ ਗਿਣਤੀ ਚਕ ਦੀ ਪੈਰੀ ਤੇ ਟੋਕਿਊ ਦੀ ਵਾਰਡੀ ਵਧ ਜਾਂਦੀ ਹੈ - ਇਹ ਤਾਂ ਕਿਹਾ ਜਾਂਦਾ ਹੈ "ਚਕ ਟੋਕਿਊ"।
e. ਸ਼ਕਤੀ ਅਤੇ ਟੋਕਿਊ ਅਤੇ ਕੌਣਾਂ ਵੇਗ ਦਾ ਸਬੰਧ: ਸ਼ਕਤੀ P = ਟੋਕਿਊ T × ਕੌਣਾਂ ਵੇਗ ω.
ਜਿਵੇਂ ਕਿ ਸ਼ਕਤੀ P = ਕਾਰਜ W ÷ ਸਮੇਂ t, ਅਤੇ ਕਾਰਜ W = ਬਲ F × ਦੂਰੀ s, ਇਸ ਲਈ P = F×s⁄t = F×ਰੇਖੀ ਵੇਗ v. ਇੱਥੇ v ਰੇਖੀ ਵੇਗ ਹੈ। ਇੱਕ ਇੰਗਿਨ ਵਿੱਚ, ਕੰਕਸ਼ ਅੱਖ ਦਾ ਰੇਖੀ ਵੇਗ v = ਕੰਕਸ਼ ਅੱਖ ਦਾ ਕੌਣਾਂ ਵੇਗ ω × ਕੰਕਸ਼ ਅੱਖ ਦਾ ਰੇਡੀਅਸ r.
ਉੱਪਰ ਦੀ ਸੂਚਨਾ ਵਿੱਚ ਪ੍ਰਤੀਸਥਾਪਨ ਕਰਨ ਤੇ ਮਿਲਦਾ ਹੈ: ਪਾਵਰ P = ਬਲ F × ਰੇਡੀਅਸ r × ਖੁਰਦੀ ਗਤੀ ω. ਅਤੇ ਬਲ F × ਰੇਡੀਅਸ r = ਟਾਰਕ. ਇਸ ਲਈ, ਇਹ ਨਿਬੜਦੇ ਸਕਦੇ ਹਾਂ ਕਿ ਪਾਵਰ P = ਟਾਰਕ × ਖੁਰਦੀ ਗਤੀ ω. ਇਸ ਲਈ ਇੰਜਨ ਦੀ ਪਾਵਰ ਨੂੰ ਟਾਰਕ ਅਤੇ ਘੁਮਾਵੀ ਗਤੀ ਤੋਂ ਗਿਣਿਆ ਜਾ ਸਕਦਾ ਹੈ।
ਚਿੱਤਰ ਉਦਾਹਰਨ।
ਅਧਿਕ ਸੰਬੰਧਾਂ: ਹੇਠ ਲਿਖੇ ਹੋਰ ਇਕੱਤਰ ਘੁਮਾਵੀ ਗਤੀ ਲਈ ਹਨ।
1. ਰੇਖੀ ਵੇਗ V = s/t = 2πR/T.
2. ਖੁਰਦੀ ਗਤੀ ω = Φ/t = 2π/T = 2πf.
3. ਰੇਖੀ ਵੇਗ ਅਤੇ ਕੋਣਾਤਮਕ ਵੇਗ ਦੇ ਬਿੱਚ ਸਬੰਧ: ਰੇਖੀ ਵੇਗ = ਕੋਣਾਤਮਕ ਵੇਗ × ਤਿਰਚਾ, V = ωR.
4. ਕੋਣਾਤਮਕ ਵੇਗ ਅਤੇ ਘੁਮਾਵੀ ਗੈਰੇਡੀਅਲ ਵੇਗ ਦੇ ਬਿੱਚ ਸਬੰਧ ω = 2πn (ਇੱਥੇ ਫਿਰਕਾਂ ਅਤੇ ਘੁਮਾਵੀ ਗੈਰੇਡੀਅਲ ਵੇਗ ਨੂੰ ਇਕਸੀ ਮਤਲਬ ਹੈ).
5. ਅਵਧੀ ਅਤੇ ਫਿਰਕਾ T = 1/f.
ਮੁੱਖ ਭੌਤਿਕ ਪ੍ਰਮਾਣਾਂ ਅਤੇ ਇਕਾਈਆਂ: ਚਾਪ ਦੀ ਲੰਬਾਈ (S): ਮੀਟਰ (m); ਖੇਤਰਫਲ (Φ): ਰੇਡੀਅਨ (rad); ਫਿਰਕਾ (f): ਹਰਟਜ਼ (Hz); ਅਵਧੀ (T): ਸਕਿੰਡ (s); ਘੁਮਾਵੀ ਗੈਰੇਡੀਅਲ ਵੇਗ (n): r/s; ਤਿਰਚਾ (R): ਮੀਟਰ (m); ਰੇਖੀ ਵੇਗ (V): m/s; ਕੋਣਾਤਮਕ ਵੇਗ (ω): rad/s.




