 EN
EN
 AR
AR
 FI
FI
 NL
NL
 DA
DA
 CS
CS
 PT
PT
 PL
PL
 NO
NO
 KO
KO
 JA
JA
 IT
IT
 HI
HI
 EL
EL
 FR
FR
 DE
DE
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SK
SK
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 FA
FA
 MS
MS
 HA
HA
 KM
KM
 LO
LO
 NE
NE
 PA
PA
 YO
YO
 MY
MY
 KK
KK
 SI
SI
 KY
KY

שיניים בלתי נפרדות: ניתוח של תפקידיהן המפתח במערכות העברת כוח
הילוכים הם חיוניים במערכות העברת כוח. בענף הרכבי, הם מרכיבים עיקריים בעבורה. תיבות הילוך ידניים משתמשות בהילוכים בתיבת הילוכים. צירופי הילוך שונים מאפשרים התאמה של מהירות וכוח דחיפה לתנאים שונים של נהיגה, כמו התאוצה, נסיעה בשטח שטוח או עלייה על רמפות. הילוכים הליקליים מפחיתים את הרעש וההתקשות כדי להעניק נוחות נהיגה טובה יותר.
םאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאאא סוגים ופונקציות של הילוכים
1.0. סוגי הילוכים
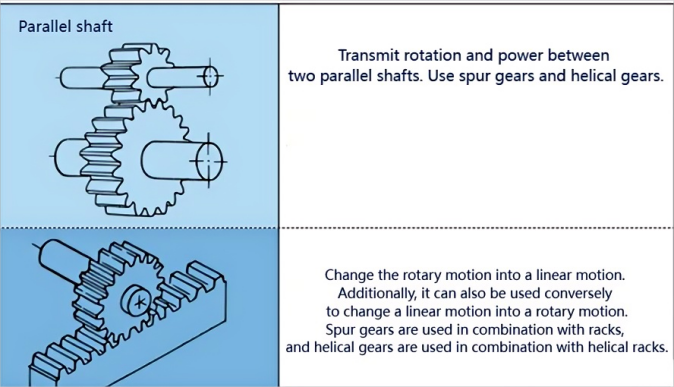
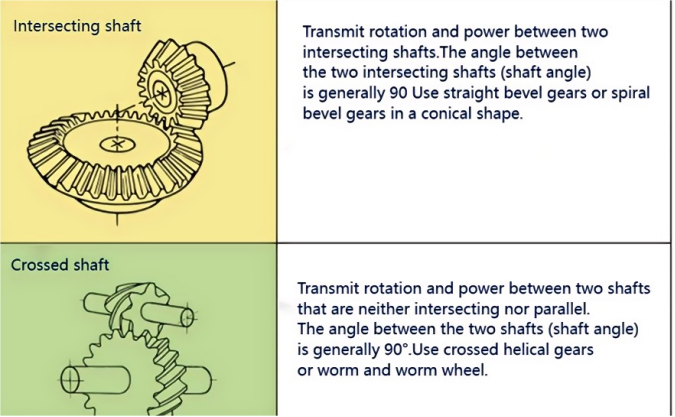
ישנם מספר רב של סוגי הילוכים. שיטת הקלאסיפיקציה הנפוצה ביותר מבוססת על ציר ההילוך. באופן כללי, הם מחולקים לשלושה סוגים: צירים מקבילים, צירים חותכים וצירים מתוקרים. הילוכים עם צירים מקבילים כוללים הילוכים ישרים, הילוכים הליקליים, הילוכים פנימיים, ג'יבים והילוכים ג'יב הליקליים וכו'. הילוכים עם צירים חותכים כוללים הילוכים קוניים ישרים, הילוכים קוניים ספירליים, הילוכים קוניים בזווית אפס וכו'. הילוכים עם צירים מתוקרים כוללים הילוכים הליקליים מתוקרים, תולעת וגלגל תולעת, הילוכים היפואידים וכו'.
(קלאסיפיקציה וסוגים של הילוכים).
|
הצפת גלגלים |
סוגי גלגלים |
יעילות(%) |
|
ציר מקביל |
גלגל שיניים ישר |
98.0-99.5 |
|
רכיבה |
||
|
גלגל פנימי |
||
|
Gear שיניים מסpiral |
||
|
גַבְנִית שְׁלִיל |
||
|
שֵׁן דָּג |
||
|
צֵלָע חָתוּךְ |
שינן בזלי ישר |
98.0-99.0 |
|
שינן בזלי ספירל |
||
|
שֶׁן קְרִינָה מַדְרֵגַת אֶפֶס |
||
|
ציר מוטב |
שיניים הלייקליות מוטבות |
70.0-95.0 |
|
תולעת וגלגל תולעת אדום |
30.0-80.0 |
היעולות המובאים בטבלה זו הם יעילויות של העברת תנועה ולא כוללים אבדנים ממחסומים, ערבוב שמן תזון וכו'. התאמה של זוגות גלגלים על צירים מקבילים וצירים חותכים היא בעיקר גלגול, והשחלוף היחסי קטן מאוד, לכן היעילות גבוהה. עבור גלגלים מסpiral עם צירים מתוחכמים, ורמיז וגלגל רמיז וכדומה, מכיוון שהסיבוב נוצר באמצעות שחלוף יחסית כדי להעתיק כוח, השפעת החיכוך גדולה מאוד והיעילוּת העברה יורדת בהשוואה לגלגלים אחרים. היעילות של גלגל היא יעילות ההעברה שלו תחת תנאים סטנדרטיים של הקמה. אם יש התקנה לא נכונה, במיוחד כאשר מרחק ההקמה של גלגלים משופעים אינו נכון ויש טעות בנקודת החיתוך הקונית, היעילות שלו תירד באופן משמעותי.
2.0 תפקיד הגלגלים גלגלים
גלגלים חייבים לשמש בזוגות כדי להיות יעילים
2.1 להעביר את הכוח של תנועה מכנית: יש הרבה גלגלים על הרבה מכוניות. הגלגלים האלה יכולים לעזור בפעילות של המכוניות או מכונות אחרות מגוונות. למשל, כמו התקן החלפת הילוכים במכוניות וקופסאות ירידה תעשייתיות וכו'. בעזרת תפקיד הגלגלים, הם יכולים לפעול בצורה נורמלית.
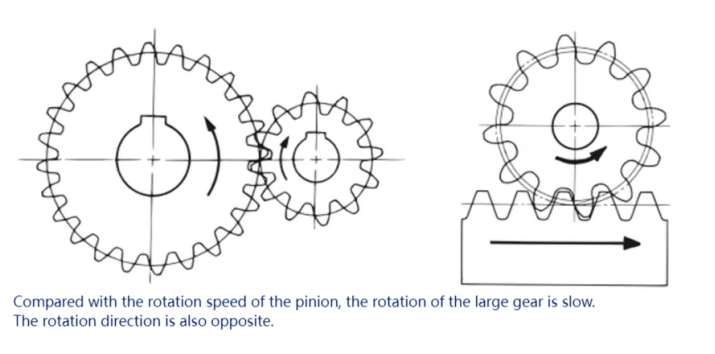
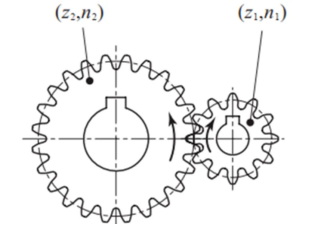
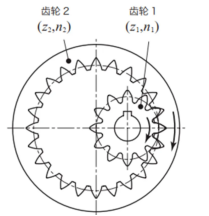
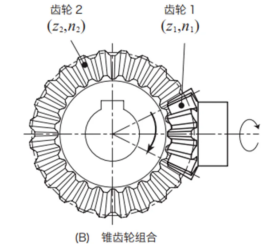
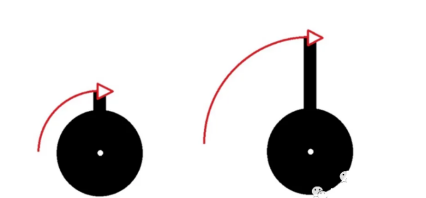
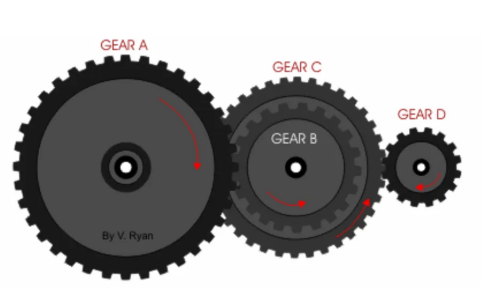
2.2 לשנות את כיוון התנועה:
האיור הבא מראה את החוק של שינוי כיוון התנועה באמצעות צירופי גלגלים שונים.
2.3 לשנות את מהירות התנועה: התקנת צירוף של גלגלים גדולים וקטנים על המاكינה יכולה לגרום למאקינה להאיץ או להאט במהירות, כמו קופסאות ירידה ומכשירי התאוצה.
2.4 לשנות את המומנט או התorsiון: הצירוף של גלגלים גדולים וקטנים ישתנה את מומנט הפלט של הגלגלים; (יש הסבר מפורט יותר בנקודה השלישית למטה.)
2, יחסי העברה וכיווני סיבוב של שרשרת גלגלים
יחס ההעברה הוא היחס בין מהירויות הזווית של שני רכיבי סיבוב במנגנון, וגם מכונה יחס המהירות. יחס ההעברה של רכיב a ורכיב b הוא i = ωa/ωb = na/nb, כאשר ωa ו-ωb הם מהירויות הזווית של רכיב a ו-b בהתאמה (רדינים לשנייה); na ו-nb הם מהירויות הסיבוב של רכיב a ו-b בהתאמה (סיבובים לדקה).
1.מנגנון גלגלים חד-שלבי: מערכת שיניים שנוצרת לאחר שזוג גלגלים מתמזגים נקראת מנגנון שיניים חד-שלבי.
תנו שהמספר של השיניים של הגלגל המניע של המנגנון החד-שלבי הוא z1, מספר המהפכות הוא n1, מספר השיניים של הגלגל הניע הוא z2, ומספר המהפכות הוא n2. משוואת חישוב יחס ההעברה היא כדלקמן:
יחס העברה = z2/z1 = n1/n2
על פי הערך של יחס ההעברה, ניתן לחלק את מנגנון ההחלפה חד-שלב לשלושה קטגוריות:
יחס ההעברה < 1, מנגנון שינויים הגדלים מהירות, n1 < n2
יחס ההעברה = 1, מנגנון הילוכים עם מהירות קבועה, n1 = n2
יחס ההעברה > 1, מנגנון הגירסה המפחית מהירות, n1 > n2
2.0 מנגנון הילוכים בשני שלבים: המנגנון הדו-שלבי מורכב משני קבוצות של מנגנוני שיניים חד-שלביים.
האיור הבא מציג את מבנה המנגנון הדו-שלבי.
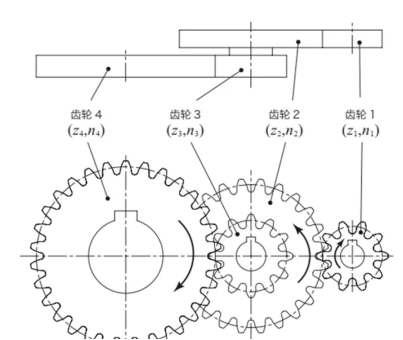
יחס הילוך = z2/z1 * z4/z3 = n1/n2 * n3/n4.
הבא הוא דוגמה לחישוב יחס ההילוך של מנגנון שיניים דו-שלבי.
|
מספר סדרה |
פריט |
קוד |
נוסחא |
דוגמה לחישוב |
|
|
שיניים |
גראניט גדול |
||||
|
1 |
מספר שיניים (הילוך ראשון) |
Z1,Z2 |
קבע ערך |
10 |
24 |
|
2 |
מספר שיניים (השלב השני של הילוח) |
Z3,24 |
12 |
30 |
|
|
3 |
סיבוב (הילוח 1) |
n1 |
1200 |
- |
|
|
4 |
יחס העברת כוח (השלב הראשון) |
i1 |
Z2/Z1 |
2.4 |
|
|
5 |
יחס העברה (השלב השני) |
i2 |
Z4/Z3 |
2.5 |
|
|
6 |
יחס העברה |
אני |
i1×i2 |
6 |
|
|
7 |
מהירות סיבוב (הילוכים 2 ו-3) |
n2 |
n1/i1 |
500 |
|
|
8 |
מהירות סיבוב (הילוך 4) |
n4 |
n1/i |
- |
200 |
|
היחידה של מהירות סיבוב היא סיבובים לדקה. הערך המוגדר הוא הערך שהותאם מראש oleh העצבן. |
|||||
三、 קשר בין מומנט, כוח ומהירות סיבוב
נראה קודם כמה נוסחאות ונבין אותן צעד אחר צעד.
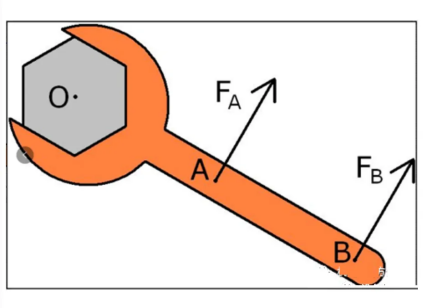
א. בפיזיקה, המומנט של כוח, מומנט של כוח = כוח × זרוע התמך (קו ישר). הנוסחה לחישוב מומנט הכח היא M = L×F. יחידת מומנט הכח היא ניוטון-מטר, פשוט נקרא N-m, עם הסמל N*m.
זרוע מוט OA × כוח Fa = זרוע מוט OB × כוח Fb.
ב. במצב סיבוב, רגע כוח (מקרה מיוחד של רגע כוח) = F (כוח) × r (רדיוס הסיבוב), כלומר, תוצאת הכפל בין הכוח המשיק לרדיוס המעגל מהכוח לנקודה של פעולת הכוח. הנוסחה לחישוב רגע כוח היא: M = F*r.
ג. הקשר בין רגע כוח לסpped סיבוב: T = 9550P / n, P = T * n / 9550; P הוא הכוח בקילוואט (kW); T הוא רגע כוח בשניון-מטרים (N·m); n הוא ספד סיבוב בהזיות לדקה (r / min). 9550 הוא קבוע.
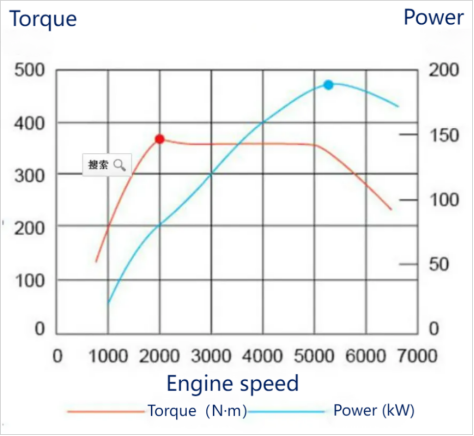
ד. הקשר בין הכוח לרגע כוח וספד הסיבוב: כוח (kW) P = רגע כוח (N·m) T × ספד סיבוב (הזיות לדקה) n/9550, כלומר, P = T*n/9550, שיכולים להבין עם התמונה הבאה.
כפי שמשתמע מתרשים סיבוב הילדה, העוצמה נשארת ללא שינוי (המנית אובדני העברה), אך מהירות הסיבוב ירידה. לפי עוצמה = מומנט × מהירות סיבוב (*קבוע), מספר הפעמים שהמהירות בסוף הגלגל ירדה זהה למספר הפעמים שהמומנט בסוף הגלגל גדל - וזהו המושג הנקרא "מומנט הגלגל".
ה. היחס בין עוצמה למומנט וLOCITY זוויתית: עוצמה P = מומנט T × מהירות זוויתית ω.
מכיוון שהעוצמה P = עבודה W ÷ זמן t, ועבודה W = כוח F × מרחק s, אז P = F×s/t = F×מהירות קווית v. כאן v הוא המהירות הקוית. במנוע, המהירות הקוית v של ציר ההילוך = המהירות הזוויתית ω של ציר ההילוך × הרדיוס r של ציר ההילוך.
הצבה בנוסחה לעיל נותנת: עוצמה P = כוח F × רדיוס r × מהירות זוויתית ω. וכוח F × רדיוס r = מומנט. לכן, ניתן להסיק שעוצמה P = מומנט × מהירות זוויתית ω. לכן, עוצמת המנוע יכולה לחוש על פי המומנט והמהירות הזוויתית.
דוגמאות תצוגה.
יחסים נוספים: הבאים הם עבור תנועה מעגלית שווה.
1. מהירות קווית V = s/t = 2πR/T.
2. מהירות זוויתית ω = Φ/t = 2π/T = 2πf.
3. היחס בין מהירות קווית למהירות זוויתית: מהירות קווית = מהירות זוויתית × רדיוס, V = ωR.
4. היחס בין מהירות זוויתית למהירות סיבוב ω = 2πn (כאן תדירות ומהירות סיבוב יש להן את אותו משמעות).
5. תקופה ותדירות T = 1/f.
מagnitudes פיזיקליות עיקריות ויחידות: אורך קשת (S): מטר (m); זווית (Φ): רדיאן (rad); תדירות (f): הרץ (Hz); תקופה (T): שניה (s); מהירות סיבוב (n): סיבובים לשנייה (r/s); רדיוס (R): מטר (m); מהירות קווית (V): m/s; מהירות זוויתית (ω): rad/s.




