 EN
EN
 AR
AR
 FI
FI
 NL
NL
 DA
DA
 CS
CS
 PT
PT
 PL
PL
 NO
NO
 KO
KO
 JA
JA
 IT
IT
 HI
HI
 EL
EL
 FR
FR
 DE
DE
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SK
SK
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 FA
FA
 MS
MS
 HA
HA
 KM
KM
 LO
LO
 NE
NE
 PA
PA
 YO
YO
 MY
MY
 KK
KK
 SI
SI
 KY
KY

Engranajes indispensables: Analizando sus roles clave en los sistemas de transmisión
Las engranajes son vitales en los sistemas de transmisión. En el sector automotriz, son fundamentales en la transmisión. Las transmisiones manuales utilizan engranajes en la caja de cambios. Diferentes combinaciones de engranajes permiten ajustes de velocidad y par para diversas condiciones de conducción, como aceleración, crucero o subida. Los engranajes helicoidales reducen el ruido y las vibraciones para una mayor comodidad al conducir.
el Tipos y Funciones de Engranajes
1.0. Tipos de Engranajes
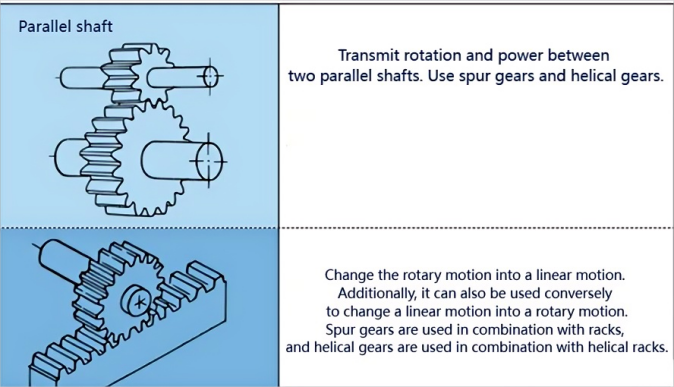
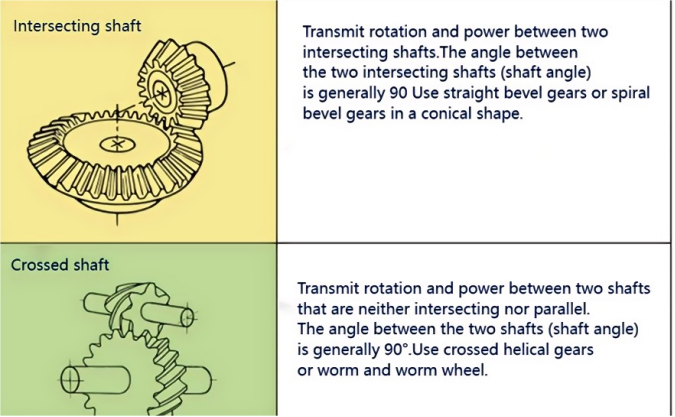
Existen numerosos tipos de engranajes. El método de clasificación más común se basa en el eje del engranaje. Generalmente, se dividen en tres tipos: ejes paralelos, ejes intersectados y ejes cruzados. Los engranajes de ejes paralelos incluyen engranajes cilíndricos, engranajes helicoidales, engranajes internos, piñones y piñones helicoidales, etc. Los engranajes de ejes intersectados incluyen engranajes cónicos rectos, engranajes cónicos espirales, engranajes cónicos de cero grados, etc. Los engranajes de ejes cruzados incluyen engranajes helicoidales cruzados, gusanos y ruedas de gusano, engranajes hipoides, etc.
(Clasificación y tipos de engranajes).
|
Clasificación de engranajes |
Tipo de engranajes |
Eficiencia (%) |
|
Eje paralelo |
Rueda dentada espuria |
98.0-99.5 |
|
Las demás |
||
|
Aplicación interna |
||
|
Piñón Helicoidal |
||
|
Rack helicoidal |
||
|
Engranaje en Forma de Herringbone |
||
|
Eje intersectado |
Piñón cónico recto |
98.0-99.0 |
|
Engranaje espiral cono |
||
|
Piñón cónico de cero grados |
||
|
Eje cruzado |
Rodamientos helicoidales cruzados |
70.0-95.0 |
|
Gusano cilíndrico y rueda de gusano |
30.0-80.0 |
Las eficiencias enumeradas en esta tabla son eficiencias de transmisión y no incluyen pérdidas por rodamientos, agitación de lubricación, etc. El acoplamiento de pares de engranajes en ejes paralelos y ejes que se cruzan es básicamente de rodadura, y el deslizamiento relativo es muy pequeño, por lo que la eficiencia es alta. Para engranajes helicoidales cruzados, gusanos y ruedas de gusano y otros pares de engranajes con ejes cruzados, ya que la rotación se genera a través del deslizamiento relativo para lograr la transmisión de potencia, la influencia de la fricción es muy grande, y la eficiencia de transmisión disminuye en comparación con otros engranajes. La eficiencia de un engranaje es la eficiencia de transmisión del engranaje bajo condiciones normales de ensamblaje. Si hay una instalación incorrecta, especialmente cuando la distancia de ensamblaje del engranaje cónico es incorrecta y hay un error en el punto de intersección cónica, su eficiencia disminuirá significativamente.
2.0 El papel de los engranajes Los engranajes
Los engranajes deben usarse en pares para ser efectivos
2.1 Transmitir la potencia del movimiento mecánico: Hay muchos engranajes en muchos coches. Estos engranajes pueden ayudar al funcionamiento de los coches u otras máquinas diversas. Por ejemplo, como el dispositivo de cambio en los coches y las cajas reductoras industriales, etc. Con la función de los engranajes, ellos pueden operar normalmente.
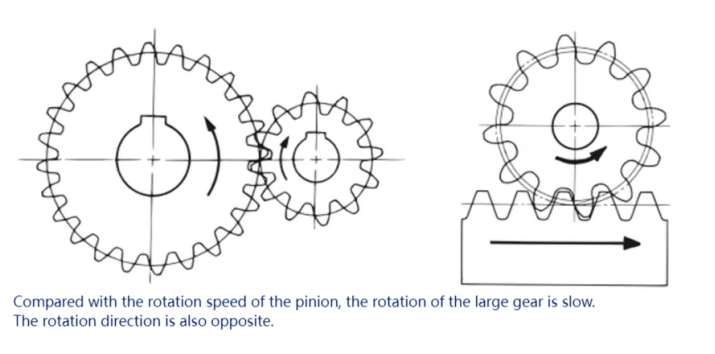
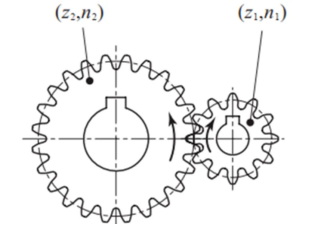
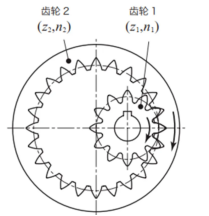
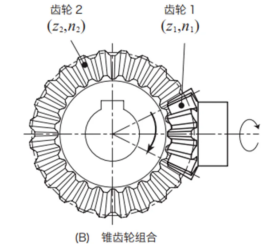
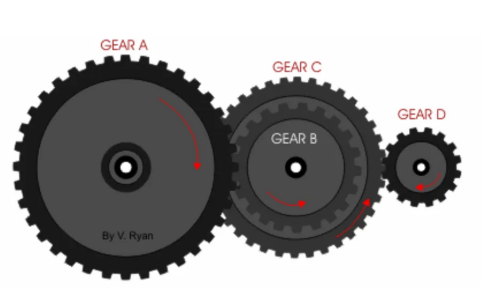
2.2 Cambiar la dirección del movimiento:
La siguiente figura muestra la ley del cambio de dirección del movimiento mediante diferentes combinaciones de engranajes.
2.3 Cambiar la velocidad del movimiento: Instalar la combinación de engranajes grandes y pequeños en la máquina puede hacer que la máquina acelere o deceleccione rápidamente, como las cajas de reducción y los dispositivos de aceleración.
2.4 Cambiar el par o torsión: La combinación de engranajes grandes y pequeños cambiará el par de salida de los engranajes; (Hay una explicación detallada en el tercer punto a continuación.)
2, Relaciones de transmisión y direcciones de rotación de los trenes de engranajes
La relación de transmisión es la relación de las velocidades angulares de dos componentes giratorios en un mecanismo, también conocida como la relación de velocidad. La relación de transmisión del componente a y del componente b es i = ωa/ωb = na/nb, donde ωa y ωb son las velocidades angulares del componente a y b respectivamente (radianes por segundo); na y nb son las velocidades de rotación del componente a y b respectivamente (revoluciones por minuto).
1.Mecanismo de engranaje de una sola etapa: Un tren de engranajes formado después de que un par de engranajes se enrejelen se llama un mecanismo de engranajes de una sola etapa.
El número de dientes del engranaje de accionamiento del mecanismo de engranaje de un solo paso sea z1, el número de revoluciones sea n1, el número de dientes del engranaje accionado sea z2 y el número de revoluciones sea n2. La ecuación de cálculo del coeficiente de transmisión es la siguiente:
La relación de transmisión = z2/z1 = n1/n2
De acuerdo con el valor de la relación de transmisión, el mecanismo de engranaje de un solo estado se puede dividir en tres categorías:
Relación de transmisión < 1, mecanismo de engranaje de aumento de velocidad, n1 < n2
Relación de transmisión = 1, mecanismo de engranaje a velocidad constante, n1 = n2
Relación de transmisión > 1, mecanismo de engranaje de reducción de velocidad, n1 > n2
2.0 Mecanismo de engranaje de dos etapas: El mecanismo de engranaje de dos etapas está compuesto por dos conjuntos de mecanismos de engranaje de una sola etapa.
La siguiente figura muestra la estructura del mecanismo de engranajes de dos etapas.
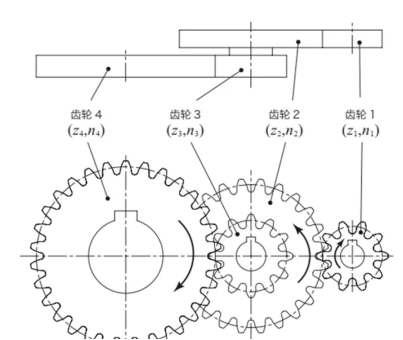
Relación de transmisión = z2/z1 * z4/z3 = n1/n2 * n3/n4.
A continuación se presenta un ejemplo de cálculo de la relación de transmisión de un mecanismo de engranajes de dos etapas.
|
Número de serie |
Artículo |
Código |
Formulario |
Ejemplo de cálculo |
|
|
Piñón |
Engranaje grande |
||||
|
1 |
Número de dientes (primera etapa de engranaje) |
Z1,Z2 |
Valor establecido |
10 |
24 |
|
2 |
Número de dientes (segunda etapa de engranaje) |
Z3,24 |
12 |
30 |
|
|
3 |
Rotación (piñón 1) |
n1 |
1200 |
- |
|
|
4 |
Relación de transmisión (primera etapa) |
el 1 |
Z2/Z1 |
2.4 |
|
|
5 |
Relación de transmisión (segunda etapa) |
el número de |
Z4/Z3 |
2.5 |
|
|
6 |
Relación de transmisión |
yo |
i1×i2 |
6 |
|
|
7 |
Velocidad de rotación (piñones 2 y 3) |
n2 |
n1/i1 |
500 |
|
|
8 |
Velocidad de rotación (piñón 4) |
n4 |
n1/i |
- |
200 |
|
La unidad de velocidad de rotación es rpm. El valor establecido es el valor preajustado por el diseñador. |
|||||
el 3, Relación entre Par, Potencia y Velocidad de Rotación
Primero veamos algunas fórmulas y entendámoslas paso a paso.
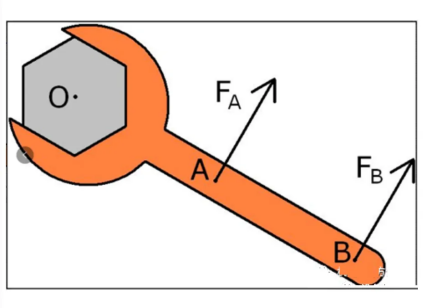
a. En física, el momento de la fuerza, momento de la fuerza = fuerza × brazo de palanca (línea recta). La fórmula para calcular el momento de la fuerza es M = L×F. La unidad del momento de la fuerza es Newton-metro, simplemente llamado N-m, con el símbolo N*m.
Brazo de palanca OA × fuerza Fa = brazo de palanca OB × fuerza Fb.
b. En un estado de rotación, el par (un momento especial de la fuerza) = F (fuerza) × r (radio de rotación), es decir, el producto de la fuerza tangencial y el radio del círculo desde la fuerza hasta el punto de acción. La fórmula para calcular el par es: M = F*r.
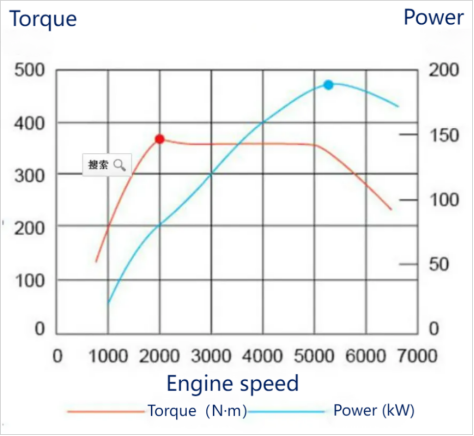
c. La relación entre par y velocidad de rotación: T = 9550P / n, P = T * n / 9550; P es potencia en kilovatios (kW); T es par en newton-metros (N·m); n es la velocidad de rotación en revoluciones por minuto (r/min). 9550 es una constante.
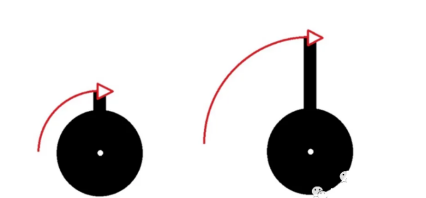
d. La relación entre potencia, par y velocidad de rotación: Potencia (kW) P = Par (N·m) T × Velocidad de rotación (RPM) n/9550, es decir, P = T*n/9550, lo cual se puede entender con la siguiente figura.
Como se puede ver en el diagrama de rotación de engranajes, la potencia permanece inalterada (ignorando las pérdidas de transmisión), pero disminuye la velocidad de rotación. Según potencia = par × velocidad de rotación (*constante), el número de veces que se reduce la velocidad de rotación en el extremo de la rueda es igual al número de veces que aumenta el par en el extremo de la rueda - este es el llamado "par de la rueda".
e. La relación entre potencia, par y velocidad angular: Potencia P = par T × velocidad angular ω.
Como la potencia P = trabajo W ÷ tiempo t, y trabajo W = fuerza F × distancia s, entonces P = F×s/t = F×velocidad lineal v. Aquí v es la velocidad lineal. En un motor, la velocidad lineal v del cigüeñal = la velocidad angular ω del cigüeñal × el radio r del cigüeñal.
Sustituyendo en la fórmula anterior se obtiene: potencia P = fuerza F × radio r × velocidad angular ω. Y fuerza F × radio r = par. Por lo tanto, se puede concluir que potencia P = par × velocidad angular ω. Así que la potencia de un motor se puede calcular a partir del par y la velocidad de rotación.
Ejemplos gráficos.
Relaciones complementarias: Las siguientes son para un movimiento circular uniforme.
1. Velocidad lineal V = s/t = 2πR/T.
2. Velocidad angular ω = Φ/t = 2π/T = 2πf.
3. La relación entre la velocidad lineal y la velocidad angular: Velocidad lineal = velocidad angular × radio, V = ωR.
4. La relación entre la velocidad angular y la velocidad de rotación ω = 2πn (aquí frecuencia y velocidad de rotación tienen el mismo significado).
5. Período y frecuencia T = 1/f.
Principales magnitudes físicas y unidades: Longitud del arco (S): metro (m); ángulo (Φ): radián (rad); frecuencia (f): hercio (Hz); período (T): segundo (s); velocidad de rotación (n): r/s; radio (R): metro (m); velocidad lineal (V): m/s; velocidad angular (ω): rad/s.




