 EN
EN
 AR
AR
 FI
FI
 NL
NL
 DA
DA
 CS
CS
 PT
PT
 PL
PL
 NO
NO
 KO
KO
 JA
JA
 IT
IT
 HI
HI
 EL
EL
 FR
FR
 DE
DE
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SK
SK
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 FA
FA
 MS
MS
 HA
HA
 KM
KM
 LO
LO
 NE
NE
 PA
PA
 YO
YO
 MY
MY
 KK
KK
 SI
SI
 KY
KY

Unverzichtbare Getriebe: Analyse ihrer Schlüsselrollen in Übertragungssystemen
Zahnräder sind von entscheidender Bedeutung in Übertragungssystemen. Im Automobilbereich spielen sie eine Schlüsselrolle in der Getriebeübertragung. Schaltgetriebe verwenden Zahnräder in der Gangbox. Verschiedene Zahnradaufstellungen ermöglichen Geschwindigkeits- und Drehmomentanpassungen für verschiedene Fahrbedingungen, wie Beschleunigen, Kreuzen oder Steigen. Helikale Zahnräder reduzieren Geräusche und Vibrationen für ein besseres Fahrkomfort.
ein Arten und Funktionen von Zahnrädern
1.0. Arten von Zahnrädern
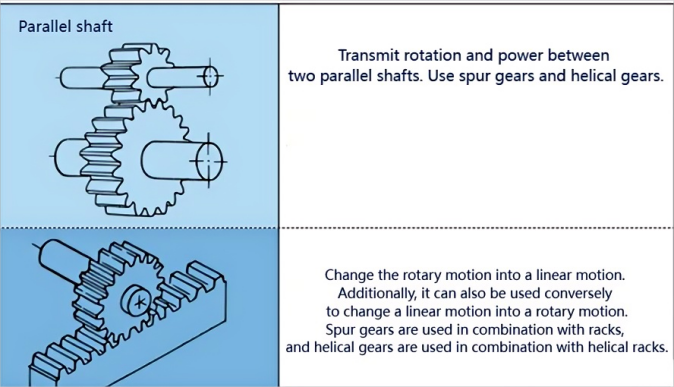
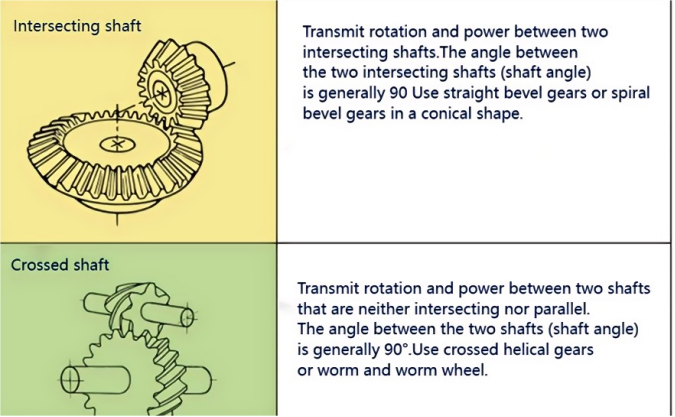
Es gibt zahlreiche Arten von Zahnrädern. Die gebräuchlichste Klassifizierungsmethode basiert auf der Wellachse des Zahnrades. Im Allgemeinen werden sie in drei Typen unterteilt: Parallel-Achsen, schneidende Achsen und gekreuzte Achsen. Parallel-Achsen-Zahnräder umfassen Stirnrad, helikale Zahnräder, Innenräder, Rechen und schräge Rechen usw. Schneidende-Achsen-Zahnräder umfassen gerade Kegelräder, spiralförmige Kegelräder, Nullgrad-Kegelräder usw. Gekreuzte-Achsen-Zahnräder umfassen gekreuzte helikale Zahnräder, Wurmräder und Wurmkolben, Hypoidräder usw.
(Klassifizierung und Arten von Zahnrädern).
|
Klassifikation von Getrieben |
Art von Getrieben |
Effizienz (%) |
|
Parallelwellen |
Stirnrad |
98.0-99.5 |
|
Gestell |
||
|
Innenverzahnung |
||
|
Schrägverzahnung |
||
|
Schrägzigel |
||
|
Schrägzahnrad |
||
|
Durchdringende Welle |
Gerades Kegelrad |
98,0-99,0 |
|
Spiralverzahnung |
||
|
Nullgrad-Schrägverzahnung |
||
|
Gekreuzte Welle |
Gekreuzte Schrägverzahnungen |
70.0-95.0 |
|
Zylindrischer Wurmkolben und Wurmrad |
30.0-80.0 |
Die in dieser Tabelle aufgeführten Effizienzen sind Übertragungseffizienzen und enthalten keine Verluste durch Lager, Rührungen der Schmierung usw. Die Verzahnung von Zahnradpaaren auf parallelen Achsen und sich schneidenden Achsen erfolgt grundsätzlich durch Rollen, wobei die relative Gleitung sehr gering ist, daher ist die Effizienz hoch. Bei gekreuzten Achsen, wie bei Schrägverzahnungen, Wurmkolben und Wurmrädern und anderen gekreuzten Zahnradsystemen wird die Rotation durch relative Gleitung zur Leistungsübertragung erzeugt, wodurch der Einfluss der Reibung sehr groß ist und die Übertragungseffizienz im Vergleich zu anderen Zähnen abnimmt. Die Effizienz eines Zahnrades ist die Übertragungseffizienz des Zahnrades unter normalen Montagebedingungen. Bei falscher Installation, insbesondere wenn der Abstand der Kegelräder falsch ist und ein Fehler im konischen Schnittpunkt vorliegt, nimmt seine Effizienz erheblich ab.
2.0 Die Funktion von Zähnen Zähne
Zähne müssen paarweise eingesetzt werden, um wirksam zu sein
2.1 Übertrage die Kraft der mechanischen Bewegung: Es gibt viele Zahnräder in vielen Autos. Diese Zahnräder können den Betrieb von Autos oder verschiedenen anderen Maschinen unterstützen. Zum Beispiel wie das Schaltgetriebe in Autos und industriellen Reduktoren usw. Mit der Funktion der Zahnräder können sie normal operieren.
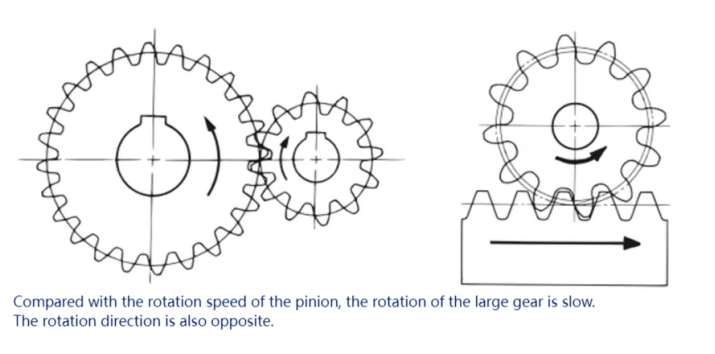
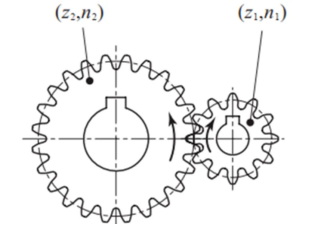
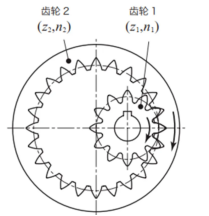
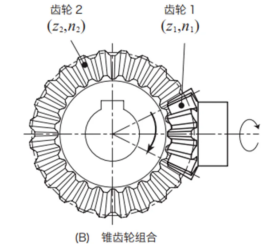
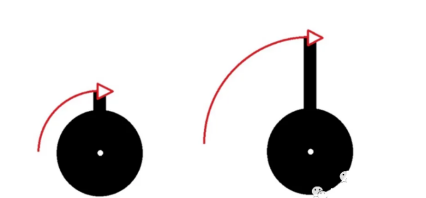
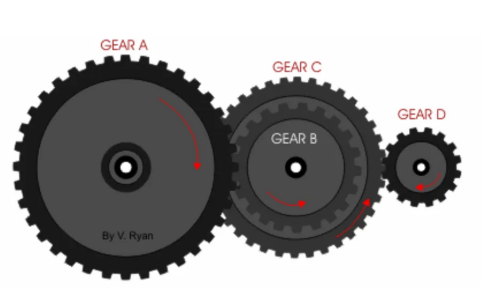
2.2 Ändere die Bewegungsrichtung:
Die folgende Abbildung zeigt das Gesetz der Änderung der Bewegungsrichtung durch verschiedene Zahnradkombinationen.
2.3 Ändere die Bewegungsgeschwindigkeit: Durch die Installation von Kombinationen aus großen und kleinen Zähnen auf der Maschine kann diese schneller beschleunigen oder abbremsen, wie zum Beispiel in Reduktoren und Beschleunigungseinheiten.
2.4 Drehmoment oder Torsion ändern: Die Kombination aus großen und kleinen Zähnen verändert das vom Getriebe ausgegebene Drehmoment; (Im dritten Punkt unten gibt es eine detaillierte Erklärung.)
2, Übertragungsverhältnisse und Rotationsrichtungen von Zahnrädern
Das Übertagungsverhältnis ist das Verhältnis der Winkelgeschwindigkeiten zweier rotierender Komponenten in einem Mechanismus, auch als Geschwindigkeitsverhältnis bekannt. Das Übertagungsverhältnis zwischen Komponente a und Komponente b ist i = ωa/ωb = na/nb, wobei ωa und ωb die Winkelgeschwindigkeiten von Komponente a und b jeweils sind (in Bogenmaß pro Sekunde); na und nb sind die Drehzahlen von Komponente a und b jeweils (in Umdrehungen pro Minute).
1.Einzugiges Getriebe: Ein nach dem Verschlingungsprinzip von einem Zahnradpaar gebildetes Getriebe wird als einstufiges Getriebe bezeichnet.
Sei die Zähnezahl des Antriebsrads des einstufigen Getriebes z1, die Umdrehungszahl n1, die Zähnezahl des angerissenen Rades z2 und die Umdrehungszahl n2. Die Berechnungsgleichung für das Übersetzungsverhältnis lautet wie folgt:
Übersetzungsverhältnis = z2/z1 = n1/n2
Gemäß dem Wert des Übersetzungsverhältnisses kann das einstufige Getriebe in drei Kategorien unterteilt werden:
Übertragungsverhältnis < 1, Geschwindigkeitssteigerung, n1 < n2
Übertragungsverhältnis = 1, konstante Geschwindigkeit, n1 = n2
Übertragungsverhältnis > 1, Geschwindigkeitsminderung, n1 > n2
2.0 Zweistufiges Getriebe: Das zweistufige Getriebe besteht aus zwei Sätzen von Einzugsgetrieben.
Die folgende Abbildung zeigt die Struktur des zweistufigen GetriebeMechanismus.
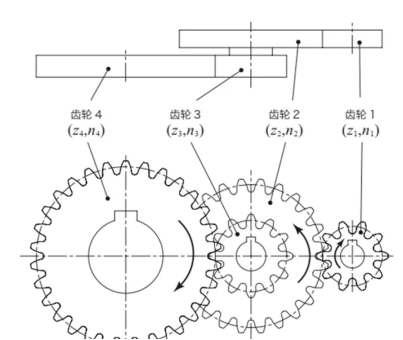
Übertragungsverhältnis = z2/z1 * z4/z3 = n1/n2 * n3/n4.
Im Folgenden wird ein Beispiel zur Berechnung des Übersetzungsverhältnisses eines zweistufigen Getriebemechanismus gezeigt.
|
Seriennummer |
Artikel |
Code |
Formel |
Berechnungsbeispiel |
|
|
PINION |
Großes Rad |
||||
|
1 |
Zahnanzahl (erstes Stufengerät) |
Z1,Z2 |
Sollwert |
10 |
24 |
|
2 |
Zahnanzahl (zweites Stufengerät) |
Z3,24 |
12 |
30 |
|
|
3 |
Drehung (Welle 1) |
n1 |
1200 |
- |
|
|
4 |
Übertragungsverhältnis (erste Stufe) |
i1 |
Z2/Z1 |
2.4 |
|
|
5 |
Übertragungsverhältnis (zweite Stufe) |
i2 |
Z4/Z3 |
2.5 |
|
|
6 |
Übertragungsverhältnis |
i |
i1×i2 |
6 |
|
|
7 |
Drehzahl (Zahnräder 2 und 3) |
n2 |
n1/i1 |
500 |
|
|
8 |
Drehzahl (Zahnrad 4) |
n4 |
n1/i |
- |
200 |
|
Die Einheit der Drehzahl ist rpm. Der Sollwert ist der vom Designer vorgegebene Wert. |
|||||
3, Zusammenhang zwischen Drehmoment, Leistung und Drehzahl
Schauen wir uns zuerst einige Formeln an und verstehen sie schrittweise.
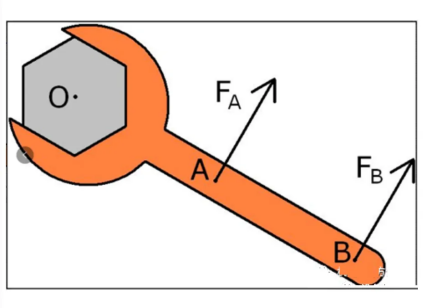
a. In der Physik das Drehmoment, Drehmoment = Kraft × Hebelarm (Gerade). Die Formel zur Berechnung des Drehmoments lautet M = L×F. Die Einheit des Drehmoments ist Newton-Meter, einfach N-m genannt, mit dem Symbol N*m.
Hebelarm OA × Kraft Fa = Hebelarm OB × Kraft Fb.
b. In einem Drehzustand ist das Drehmoment (ein spezielles Kraftmoment) = F (Kraft) × r (Drehradius), das heißt, das Produkt der tangentialen Kraft und des Kreisradius von der Kraft zum Angriffspunkt. Die Formel zur Berechnung des Drehmoments lautet: M = F*r.
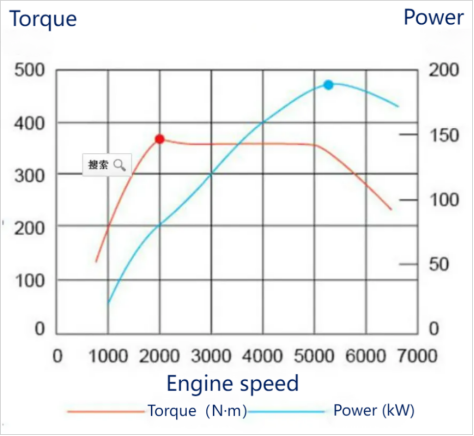
c. Das Verhältnis zwischen Drehmoment und Drehzahl: T = 9550P\/n, P = T * n\/9550; P steht für Leistung in Kilowatt (kW); T steht für Drehmoment in Newton-Meter (N·m); n steht für die Drehzahl in Umdrehungen pro Minute (U\/min). 9550 ist eine Konstante.
d. Das Verhältnis zwischen Leistung, Drehmoment und Drehzahl: Leistung (kW) P = Drehmoment (N·m) T × Drehzahl (U\/min) n\/9550, das heißt, P = T*n\/9550, was mit der folgenden Abbildung verständlich gemacht werden kann.
Wie aus dem Zahnradschaltaufbau ersichtlich ist, bleibt die Leistung unverändert (Transmissionsverluste werden vernachlässigt), während sich die Drehzahl verringert. Gemäß Leistung = Drehmoment × Drehzahl (*konstant) ist die Anzahl der Verringerungen der Drehzahl am Radends gleich der Anzahl der Erhöhungen des Drehmoments am Radends - dies ist das sogenannte "Rad-Drehmoment".
e. Das Verhältnis zwischen Leistung und Drehmoment sowie Winkelgeschwindigkeit: Leistung P = Drehmoment T × Winkelgeschwindigkeit ω.
Da Leistung P = Arbeit W ÷ Zeit t und Arbeit W = Kraft F × Weg s, folgt daraus P = F×s/t = F×Geschwindigkeit v. Hierbei ist v die lineare Geschwindigkeit. In einem Motor entspricht die lineare Geschwindigkeit v der Kurbelwelle = der Winkelgeschwindigkeit ω der Kurbelwelle × dem Radius r der Kurbelwelle.
Einsetzen in die obige Formel ergibt: Leistung P = Kraft F × Radius r × Winkelgeschwindigkeit ω. Und Kraft F × Radius r = Drehmoment. Daher kann geschlossen werden, dass Leistung P = Drehmoment × Winkelgeschwindigkeit ω. Somit kann die Leistung eines Motors aus Drehmoment und Drehzahl berechnet werden.
Bildbeispiele.
Ergänzende Beziehungen: Die folgenden gelten für die gleichförmige Kreisbewegung.
1. Geschwindigkeit V = s/t = 2πR/T.
2. Winkelgeschwindigkeit ω = Φ/t = 2π/T = 2πf.
3. Das Verhältnis zwischen der linearen Geschwindigkeit und der Winkelgeschwindigkeit: Lineare Geschwindigkeit = Winkelgeschwindigkeit × Radius, V = ωR.
4. Das Verhältnis zwischen Winkelgeschwindigkeit und Drehzahl ω = 2πn (hier haben Frequenz und Drehzahl die gleiche Bedeutung).
5. Periode und Frequenz T = 1/f.
Hauptphysikalische Größen und Einheiten: Bogenlänge (S): Meter (m); Winkel (Φ): Radian (rad); Frequenz (f): Hertz (Hz); Periode (T): Sekunde (s); Drehgeschwindigkeit (n): r/s; Radius (R): Meter (m);




