 EN
EN
 AR
AR
 FI
FI
 NL
NL
 DA
DA
 CS
CS
 PT
PT
 PL
PL
 NO
NO
 KO
KO
 JA
JA
 IT
IT
 HI
HI
 EL
EL
 FR
FR
 DE
DE
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SK
SK
 UK
UK
 VI
VI
 HU
HU
 TH
TH
 FA
FA
 MS
MS
 HA
HA
 KM
KM
 LO
LO
 NE
NE
 PA
PA
 YO
YO
 MY
MY
 KK
KK
 SI
SI
 KY
KY

دندانه های ناپذیر: تحلیل نقش کلیدی آنها در سیستم های انتقال قدرت
دندانهها در سیستمهای انتقال بسیار حیاتی هستند. در خودرو، آنها نقش کلیدی در انتقال دارند. انتقالهای دستی از دندانهها در جعبهدنده استفاده میکنند. ترکیبهای مختلف دندانه به تنظیم سرعت و گشتاور برای شرایط رانندگی مختلف، مانند شتابدهی، حرکت ثابت یا صعود کمک میکند. دندانههای هلیکویال نویز و ارتعاش را کاهش میدهند تا راحتی بیشتری در رانندگی فراهم کنند.
یک، انواع و توابع دندانهها
1.0. انواع دندانهها
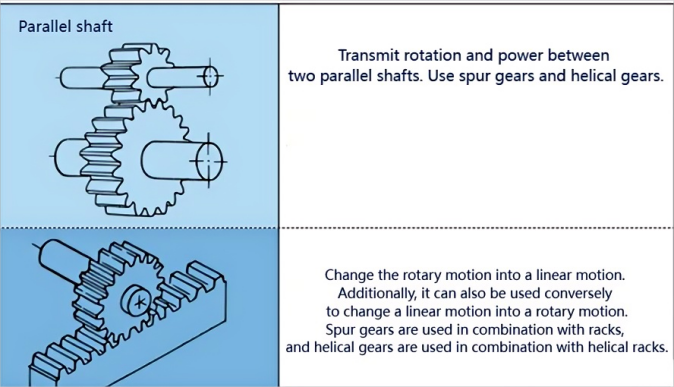
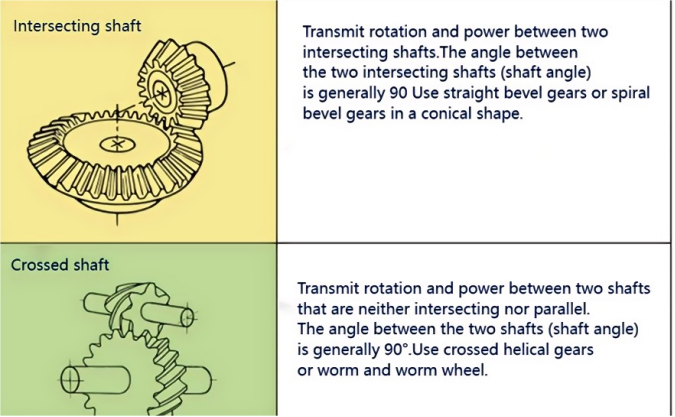
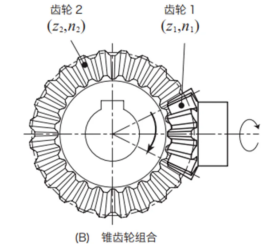
انواع مختلفی از دندانه وجود دارد. روش طبقهبندی متداول بر اساس محور دندانه است. به طور کلی، آنها به سه نوع تقسیم میشوند: با محور موازی، با محور متقاطع و با محور عبوری. دندانههای با محور موازی شامل دندانههای مستقیم، دندانههای هلیکویال، دندانههای داخلی، دندانههای خطی و دندانههای هلیکویال خطی و غیره هستند. دندانههای با محور متقاطع شامل دندانههای مخروطی مستقیم، دندانههای مخروطی هلیکویال، دندانههای مخروطی صفر درجه و غیره هستند. دندانههای با محور عبوری شامل دندانههای هلیکویال عبوری، دودوی و چرخ دودوی و دندانههای هایپوئید و غیره هستند.
(طبقهبندی و انواع دندانهها).
|
طبقه بندی دنده ها |
نوع دنده ها |
کارایی (%) |
|
محورهای موازی |
گیر دندانهای |
98.0-99.5 |
|
رَک |
||
|
دندانه داخلی |
||
|
دنده حلزونی |
||
|
دانه مارپیچ |
||
|
چرخ دنده هerringbone |
||
|
Shaft متقاطع |
گیر مایل مستقیم |
98.0-99.0 |
|
گیر غلتکی مارپیچ |
||
|
دندانه ی قائم |
||
|
Shaft عرضی |
دندانه های حلزونی عرضی |
70.0-95.0 |
|
چرخ دنده مارپیچ و چرخ دنده مارپیچی |
30.0-80.0 |
کاراییهای ذکر شده در این جدول کاراییهای انتقال هستند و از ضیاعات ناشی از محامل، آشفتگی光滑، و غیره استثناء میشوند. درهمگیری زوجهای چرخ دنده روی محورهای موازی و قطعی اساساً گلولهای است و ا滑لید نسبی بسیار کوچک است، بنابراین کارایی بالاست. برای چرخدندههای مارپیچ محور عبوری و مارپیچ و چرخ دنده مارپیچی و سایر زوجهای چرخ دنده محور عبوری، از آنجا که چرخش از طریق ا滑لید نسبی برای دستیابی به انتقال توان تولید میشود، تأثیر اصطکاک بسیار بزرگ است و کارایی انتقال نسبت به سایر چرخدندهها کاهش مییابد. کارایی یک چرخ دنده کارایی انتقال چرخ دنده تحت شرایط مونتاژ معمولی است. اگر نصب نادرست باشد، به ویژه وقتی فاصله مونتاژ چرخ دنده مخروطی نادرست باشد و خطایی در نقطه تقاطع مخروطی وجود داشته باشد، کارایی آن به طور قابل ملاحظهای کاهش مییابد.
2.0 نقش چرخدندهها چرخدندهها
چرخدندهها باید به صورت جفتها استفاده شوند تا مؤثر باشند
2.1 انتقال نیروی حرکت مکانیکی: در خیلی از ماشینها چندین دنده وجود دارد. این دندهها میتوانند در عملکرد ماشینهای مختلف، از جمله خودروها، کمک کنند. به عنوان مثال، شبیه به دستگاه تغییر دنده در خودروها و جعبههای کاهش صنعتی، غیره. با نقش دندهها، آنها میتوانند به طور عادی عمل کنند.
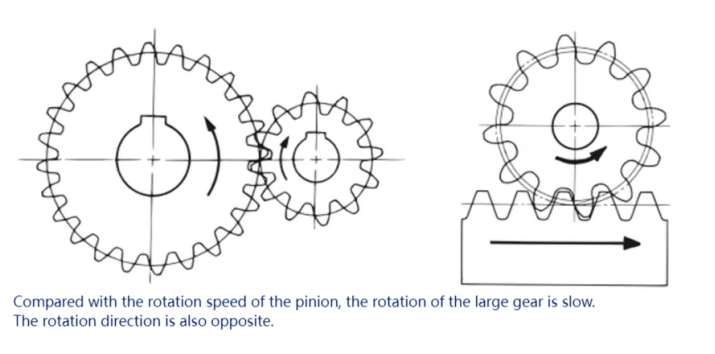
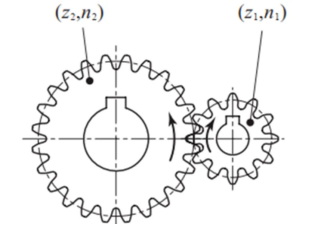
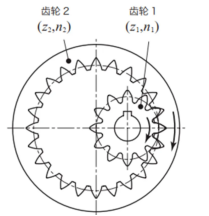
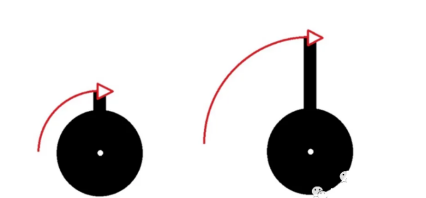
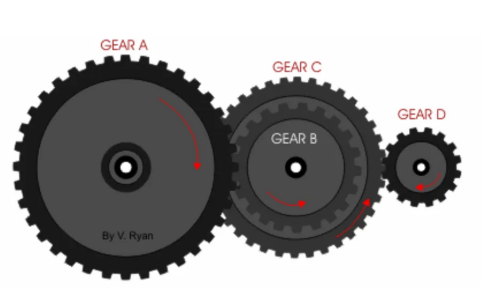
2.2 تغییر جهت حرکت:
شکل زیر قانون تغییر جهت حرکت با ترکیبات مختلف دنده را نشان میدهد.
2.3 تغییر سرعت حرکت: نصب ترکیب دندههای بزرگ و کوچک روی ماشین میتواند باعث شتاب یا کاهش سرعت سریع ماشین شود، مانند جعبههای کاهش سرعت و دستگاههای شتابدهنده.
2.4 تغییر گشتاور یا گردش: ترکیب دندههای بزرگ و کوچک گشتاور خروجی داده شده توسط دندهها را تغییر میدهد؛ (توضیح دقیقتر در سومین نکته زیر آمده است.)
2، نسبت انتقال و جهت چرخش مجموعههای دندهای
نسبت انتقال نسبت سرعتهای زاویهای دو مؤلفه چرخان در یک مکانیسم است، که همچنین به عنوان نسبت سرعت شناخته میشود. نسبت انتقال مؤلفه a و b برابر است با i = ωa/ωb = na/nb، که در آن ωa و ωb سرعتهای زاویهای مؤلفههای a و b به ترتیب هستند (درجه در ثانیه)؛ na و nb نیز سرعتهای چرخشی مؤلفههای a و b به ترتیب هستند (دور در دقیقه).
1.مکانیسم یک مرحلهای دنده: زنجیره دنده ای که پس از جفت شدن دو دنده به وجود میآید، مکانیسم دنده یک مرحلهای نامیده میشود.
فرض کنید تعداد دندانهای دنده محرک در مکانیسم دنده یک مرحلهای z1، تعداد انقلاب آن n1، تعداد دندانهای دنده معین z2 و تعداد انقلاب آن n2 باشد. معادله محاسبه نسبت انتقال به صورت زیر است:
نسبت انتقال = z2/z1 = n1/n2
بر اساس مقدار نسبت انتقال، مکانیسم دنده یک مرحلهای به سه دسته تقسیم میشود:
نسبة انتقال < 1، مکانیسم گیر تندشدن، n1 < n2
نسبة انتقال = 1، مکانیسم گیر سرعت ثابت، n1 = n2
نسبة انتقال > 1، مکانیسم گیر کندشدن، n1 > n2
2.0 مکانیسم گیر دو مرحلهای: مکانیسم گیر دو مرحلهای از ترکیب دو مجموعه مکانیسم گیر تک مرحلهای تشکیل شده است.
شکل زیر ساختار مکانیسم دندهای دو مرحلهای را نشان میدهد.
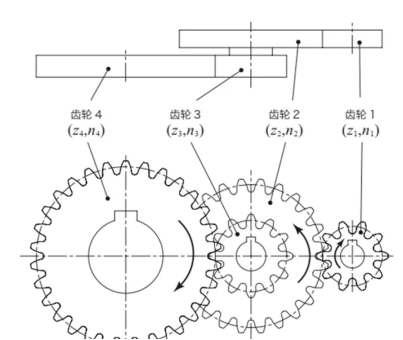
نسبت انتقال = z2/z1 * z4/z3 = n1/n2 * n3/n4.
مورد زیر یک مثال از محاسبه نسبت انتقال مکانیسم دندهای دو مرحلهای است.
|
شماره سریال |
آیتم |
کد |
فرمول |
مثال محاسبه |
|
|
پینیون |
دندانه بزرگ |
||||
|
1 |
تعداد دندانها (دندانه مرحله اول) |
Z1,Z2 |
مقدار تنظیم شده |
10 |
24 |
|
2 |
تعداد دندانها (دندانه مرحله دوم) |
Z3,24 |
12 |
30 |
|
|
3 |
چرخش (دندانه یک) |
n1 |
1200 |
- |
|
|
4 |
نسبة انتقال (مرحله اول) |
i1 |
Z2/Z1 |
2.4 |
|
|
5 |
نسبة انتقال (مرحله دوم) |
i2 |
Z4/Z3 |
2.5 |
|
|
6 |
نسبة انتقال |
من |
i1×i2 |
6 |
|
|
7 |
سرعت چرخش (دندانههای ۲ و ۳) |
n2 |
n1/i1 |
500 |
|
|
8 |
سرعت چرخش (دندانه ۴) |
n4 |
n1/i |
- |
200 |
|
واحد سرعت چرخش rpm است. مقدار تنظیم شده، مقدار پیشفرض طراح است. |
|||||
سه٬ رابطه بین مومان، قدرت و سرعت چرخش
اولین قدم، نگاهی به برخی از فرمولها و درک آنها به صورت گام به گام است.
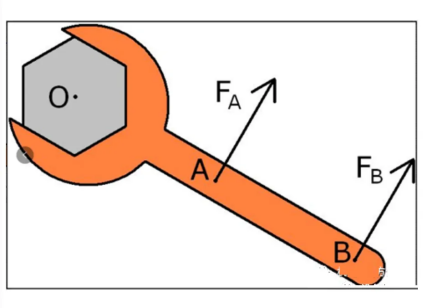
الف. در فیزیک، لحظه نیرو، لحظه نیرو = نیرو × بازوی کشان (خط مستقیم). فرمول محاسبه لحظه نیرو M = L×F است. واحد لحظه نیرو، نیوتن-متر است که به سادگی N-m نامیده میشود و با نماد N*m نشان داده میشود.
بازوی کشان OA × نیرو Fa = بازوی کشان OB × نیرو Fb.
ب. در حالت چرخشی، گشتاور (یک لحظه نیروی خاص) = F (نیرو) × r (شعاع چرخش)، یعنی حاصلضرب نیروی مماسی و شعاع دایره از محل وارد شدن نیرو تا نقطه عمل. فرمول محاسبه گشتاور: M = F*r است.
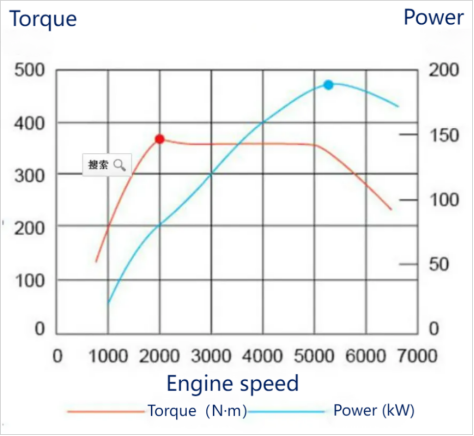
ج. رابطه بین گشتاور و سرعت چرخش: T = 9550P/n، P = T * n/9550؛ P قدرت به وات (kW) است؛ T گشتاور به نیوتن-متر (N·m) است؛ n سرعت چرخش به دور در دقیقه (r/min) است. عدد 9550 یک ثابت است.
د. رابطه بین قدرت، گشتاور و سرعت چرخش: قدرت (کیلووات) P = گشتاور (N·m) T × سرعت چرخش (دور در دقیقه) n/9550، یعنی P = T*n/9550 که میتواند با شکل زیر توضیح داده شود.
همانطور که از نمودار چرخش دندهها مشخص است، قدرت ثابت میماند (با نادیده گرفتن از دست رفتههای انتقال)، اما سرعت چرخش کاهش مییابد. بر اساس قدرت = گشتاور × سرعت چرخش (*ثابت)، تعداد بارها که سرعت چرخش در انتهای چرخ کاهش مییابد، همان تعداد بارها که گشتاور در انتهای چرخ افزایش مییابد - این به آن معروف است که "گشتاور چرخ".
ه. رابطه بین قدرت، گشتاور و سرعت زاویهای: قدرت P = گشتاور T × سرعت زاویهای ω.
چون قدرت P = کار W ÷ زمان t، و کار W = نیرو F × فاصله s، پس P = F×s/t = F×سرعت خطی v. اینجا v سرعت خطی است. در یک موتور، سرعت خطی v محور کrankshaft = سرعت زاویهای ω محور کrankshaft × شعاع r محور کrankshaft.
جایگزینی در فرمول بالا نتیجه میدهد: توان P = نیرو F × شعاع r × سرعت زاویهای ω. و نیرو F × شعاع r = گشتاور. بنابراین، میتوان نتیجه گرفت که توان P = گشتاور × سرعت زاویهای ω. پس توان موتور از گشتاور و سرعت چرخشی قابل محاسبه است.
مثالهای تصویری.
روابط مکمل: موارد زیر برای حرکت دایره ای یکنواخت است.
سرعت خطی V = s/t = 2πR/T
2. سرعت زاویهای ω = Φ/t = 2π/T = 2πf.
3. رابطه بین سرعت خطی و سرعت زاویهای: سرعت خطی = سرعت زاویهای × شعاع، V = ωR.
4. رابطه بین سرعت زاویهای و سرعت چرخشی ω = 2πn (در اینجا فرکانس و سرعت چرخشی معنای یکسانی دارند).
5. دوره و فرکانس T = 1/f.
مagnitudes فیزیکی اصلی و واحدها: طول کمان (S): متر (m); زاویه (Φ): رادیان (rad); فرکانس (f): هرتز (Hz); دوره (T): ثانیه (s); سرعت چرخشی (n): گردش در ثانیه (r/s); شعاع (R): متر (m); سرعت خطی (V): متر بر ثانیه (m/s); سرعت زاویهای (ω): رادیان بر ثانیه (rad/s).




